 Taiga was burning. In the vast area the fire devoured the greenery. Suddenly over the tops of the forest giants appeared a strange construction: the heavy metal bar on high poles. Alternately raising over the forest one and then the other paw, a huge car went to the fire, leaving a black smoldering passage. She walked like a man, hard rocking from foot to foot…
Taiga was burning. In the vast area the fire devoured the greenery. Suddenly over the tops of the forest giants appeared a strange construction: the heavy metal bar on high poles. Alternately raising over the forest one and then the other paw, a huge car went to the fire, leaving a black smoldering passage. She walked like a man, hard rocking from foot to foot…
Wait, wait, is it supposed to go walking machine? Indeed, all known constructions move quite differently. Take, for example, U.S. patent No. 2942676. He describes the device on three legs. The platform is on the ground, and at this time supports alternately move forward and remain at some angle to the surface. Then, the hydraulic cylinders “straighten” them, bringing the platform one step.
To avoid wasting energy on useless periodic platform lift, decided to increase the number of feet to eight (U.S. patent No. 3135345). When one group stands takes a step, the other prepared for the next… Mind you, these devices are first nominated support, and then they pull the platform in which is concentrated the center of gravity of the system.
Firm “General motors” has created the unit for the feet-joints. Rickety pedestrian walked on rough terrain with a speed of about 8 km/h, crossed the lifts angle up to 45° before which gave the wheeled and even tracked machines. But this device was first thrown forward feet, and then pulled up the “torso”.
The main drawback of this method walking “blind” move. The camera installed on the platform, always looking at the road at an angle. In this review of the leg is left unattended. We must take into account that the optics are shadows, glare, illuminance, etc. to Do the same leg with the “eyes” unprofitable. Therefore, the robot walks almost blindly, but the foot because of its design gets much easier in an emergency than, for example, the wheel.
Well, we invented the giant fire, with which we began, the story goes differently than his fellow walkers.
Slowly moving heavy control block on a horizontal bar, supported by two pillars. When the cab is coming to pick one it would chip like on a swing, the opposite. Then, the joint standing feet the whole structure is rotated by a certain angle. The cabin begins to climb up the rod and its weight down your raised leg. The step has been taken.
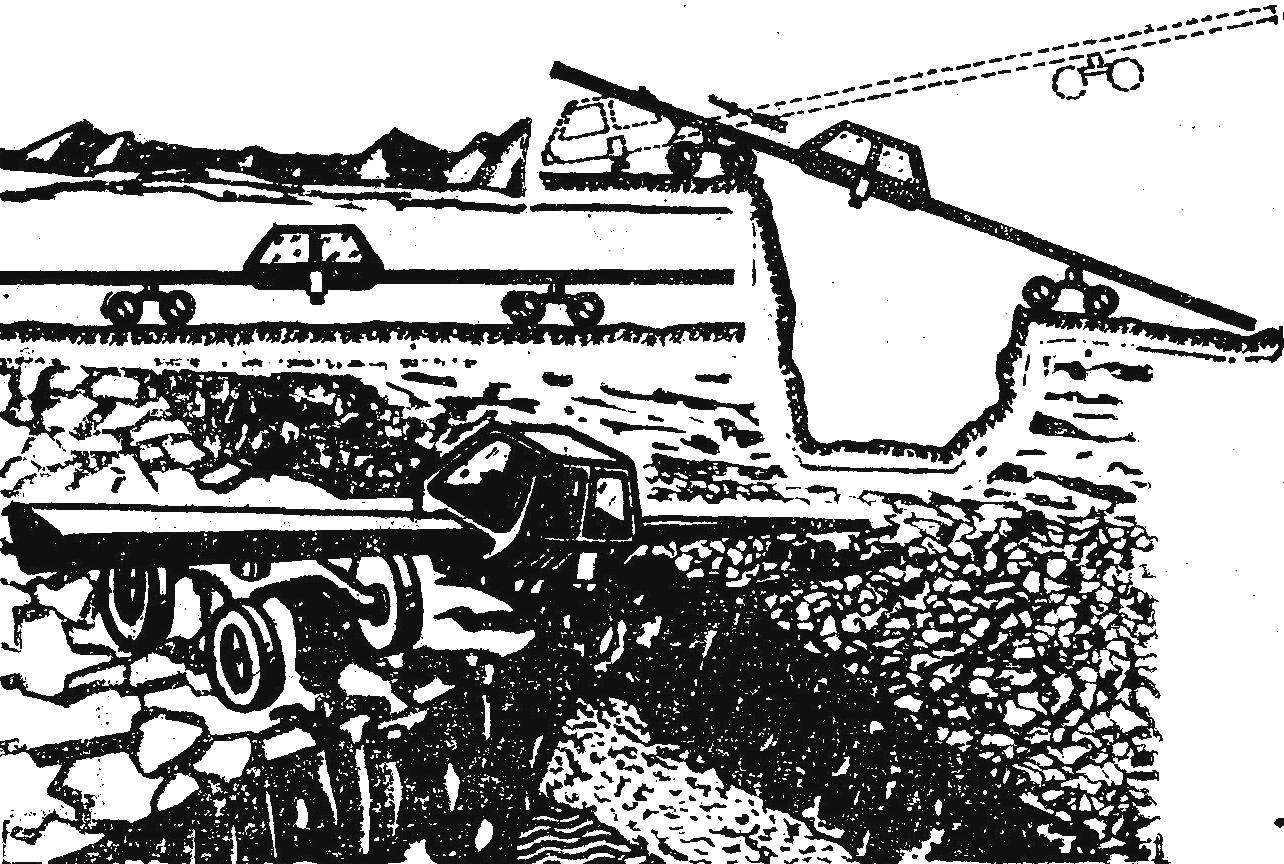
Fig. 1. The Rover is sweeping across the chasm.
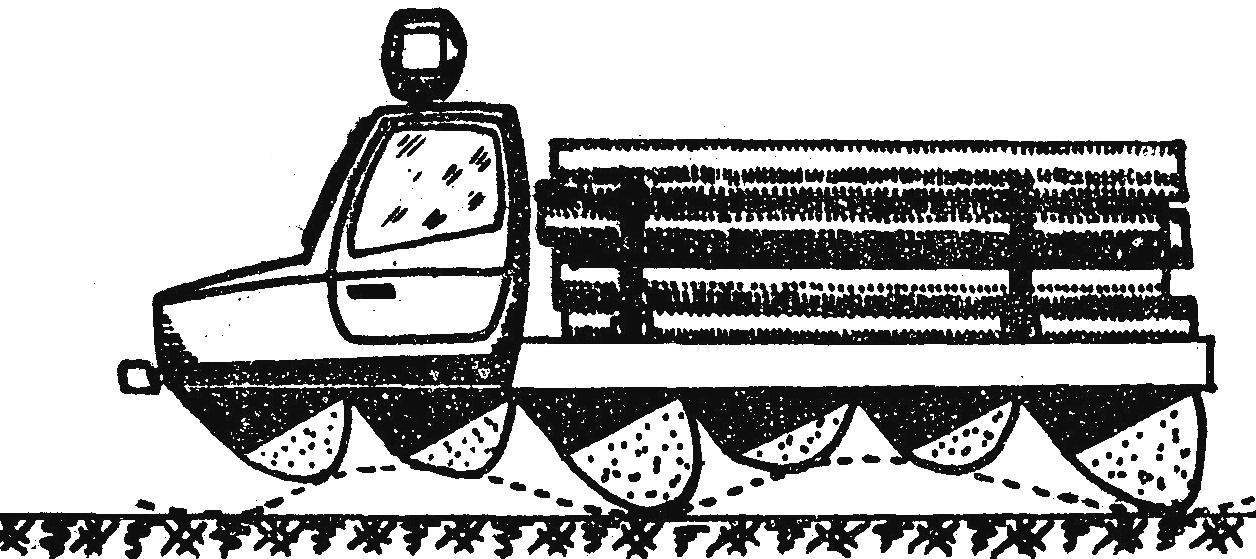
Fig. 2. Transport on rubber muscles.
What gives the robot a new walk? Safety when walking. He sees where putting your foot. And even if soil creep, the center of gravity, the control block that is far away from dangerous place, he quietly crawled back and put a leg to another point.
The patency of the device emergency compared to the known “sagalee”, in which the height of overcome obstacles is limited by the length of the legs. New construction the height of the step is determined by the size of the rod. And nothing prevents designers with the desire and need to make it telescopic, retractable. Such a robot on the shoulder with a fantastic cross: climb EV’ry mountain, climb to the cave, you cross the abyss, ice hummocks and boulders nothing to him.
But it has a flaw: the speed of walking — “Hiking”. However, the inventor found a way to spur the sloth: to the supports connect to the wheels. Machine without losing maneuverability and high cross, acquired high speed on smooth roads. Now she’s really ready for the journey, may be, for example, serious research survey. There was not, although the first models of a new walking device has already appeared. “M-K” is telling, for example, the work of the guys from Prokopyevsk, Kemerovo region. There are probably similar patterns in technical circles and other cities.
Is this design a serious contender for complex distance. He does not go, and… the creeps, the Creeps the most unusual in the world of technology way, making the under a traveling wave cutting rubber “muscles”. Before to assess the capabilities of the machine, briefly give the story told by the inventor Oh, Jolondcovschi, it is highly instructive for all homebrew.
He took up with a friend to build jetskis. But here is the problem: how to make a nozzle with variable diameter, for when traction was bigger (wide nozzle), and sometimes speed is needed (narrow nozzle).
Thought shipbuilders and remembered the squid. It for such purposes there is a special muscle, which it then compresses the mantle playing the role of the nozzle extends. Fans made of rubber muscle in the form of a hollow donut. Pumped water into it—it swells up and reduces the diameter of the nozzle. This technique is to increase the speed of the vessel, not boosting the engine. It would seem that the goal is achieved, but the idea worked then, If you connect in series the nozzle-muscles, you get… pump. Each section is alternately being compressed, will push its contents into the neighboring, etc. Traveling wave reductions will chase any object at any distance.
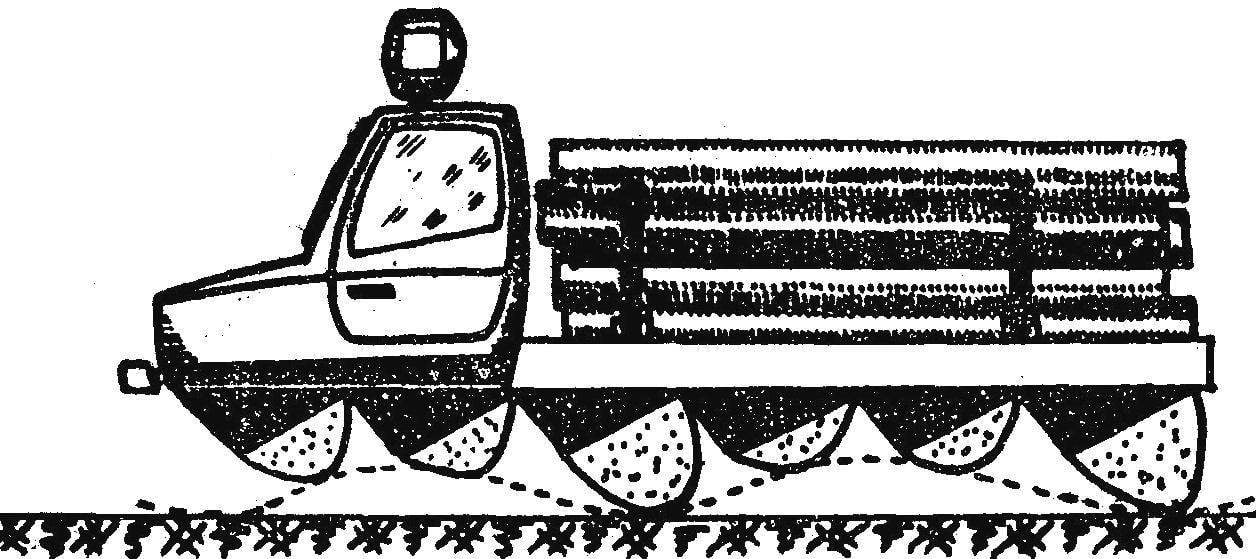
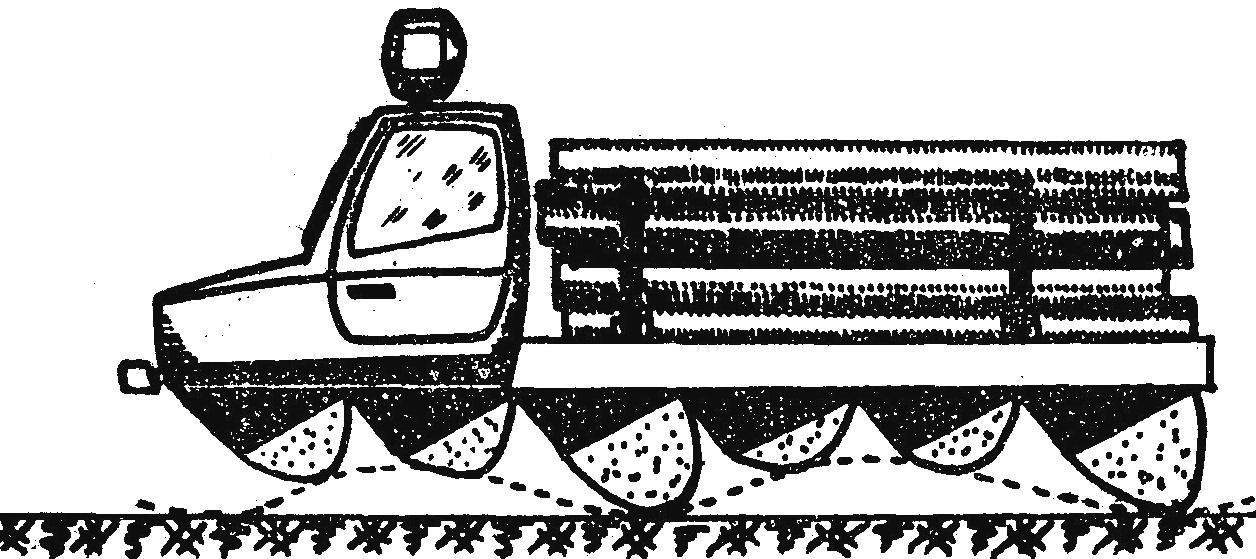
Fig. 3. The Rover-“the worm”.
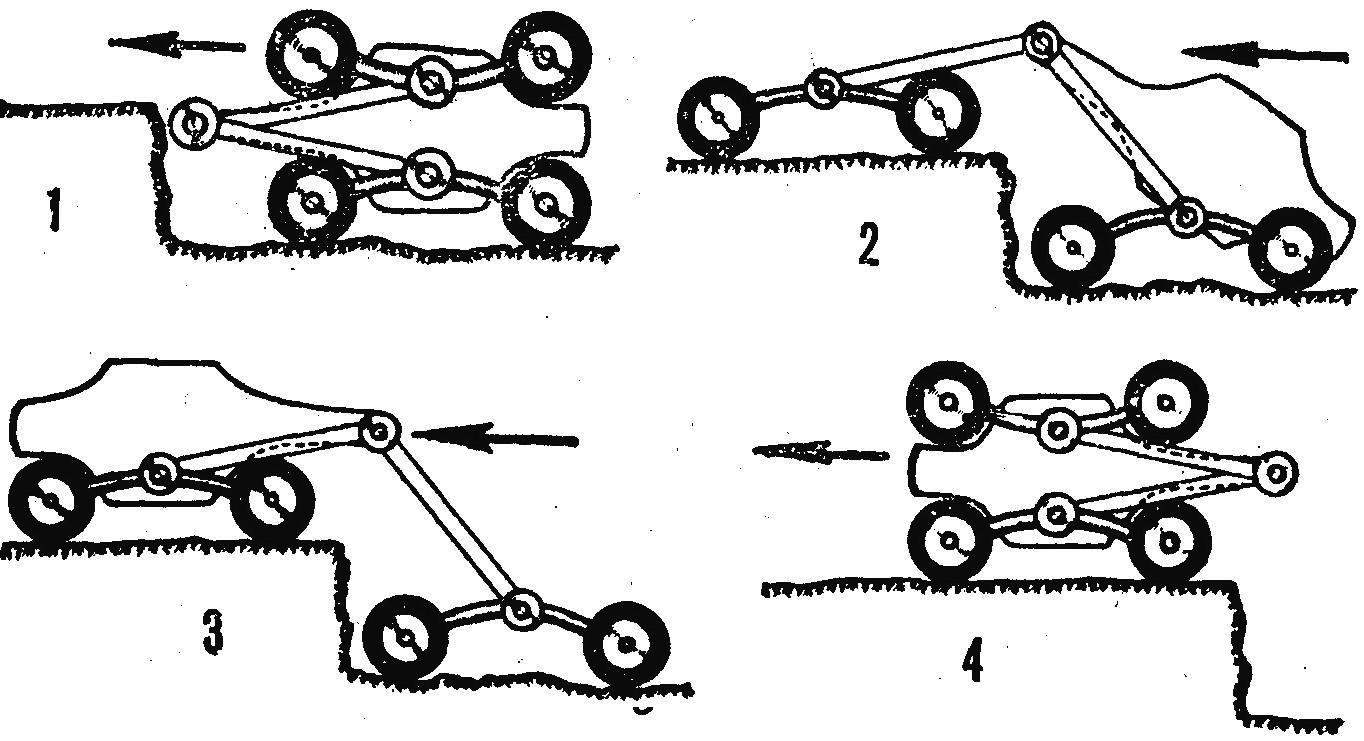
Fig. 4. So the shifter to overcome obstacles.
When guessed to cut the pump in half and deploy like an air mattress, the compartments, puffing, created a traveling wave, and a half a pump spread. There was the original mover. It resembles a screw. However, the edges of the screw, enclosed in a shell will quickly grind it, and “traveling wave” leisurely. The new version no rubbing parts, and the speed can be regulated by air valve — switch.
It is easy to think that the pressure on the ground crawling “mattress” slightly, it can easily overcome the marshy swamp. Afloat is forcing a water barrier, Having suckers will crawl on the sheer wall. That’s where our imaginary cross he has undeniable advantage over the walkers.
Jolondcovschi, fantasizing, offered another option! if the “mattress” to roll the muscles out, get the jeep-“worm”. The inside of the cab. The crew boldly goes into the cave, explores it and comes back up. Surely creeps in the jungle and fills on the cards still remaining “white spots”. In the meantime, the worm is at the start, conditional, of course, and waiting for the modelers will breathe life into him.
Now about the third member of the “competition”: the tumbling apparatus. It is the brainchild of Professor Katica. It develops the idea of transferring the center of gravity. The design of the model, explaining the essence, very simple. There are two frames on wheels, information and control block. Only three parts that are connected to each other. In the stowed position, the machine resembles a sandwich: the frame, on her block, on top of the frame. Model rolls cheerfully along the road, until it encounters an obstacle. In front of him slows down. Throws the top of the frame to the ledge. Information unit gently rotates on an axis and rests on the upper cart. Then pulled the remaining frame and covers “the back” of the shifter. The journey continues.
So there are three new ways of transportation. Which one is better in what conditions it is effective, what tasks they shoulder, these questions can be answered only real working models — prototypes of the cars of the future.
RATOV A., engineer
