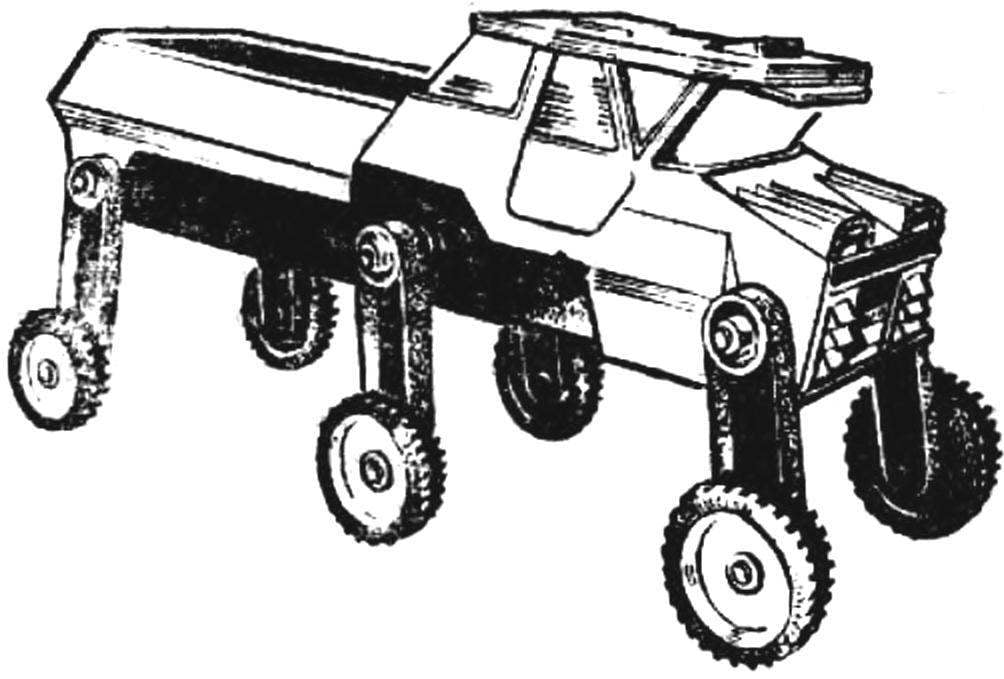
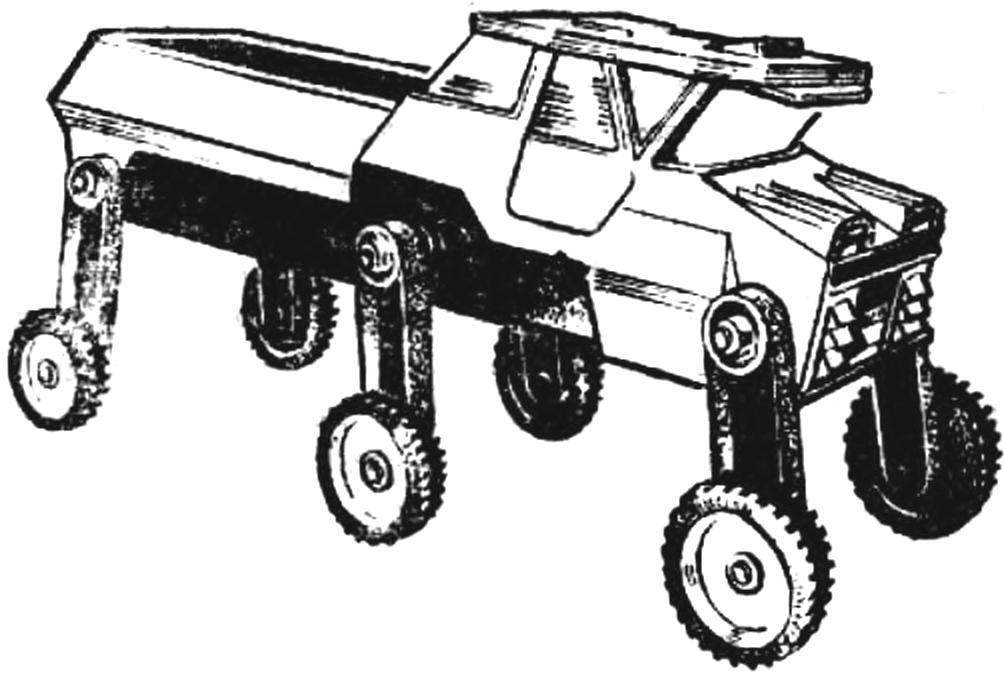
Maybe someone will seem ridiculous the claim that wheel the machine can fly over the fence, but not young technicians from the laboratory of experimental modeling and design Cute Novosibirsk Akademgorodok. On the contrary, they talk seriously about the ability of the wheels to overcome ledges, ditches, steep slopes… And in support of their arguments build working models of all-terrain vehicles. One of them is remotely controlled amphibious Atlant — created by young designers Cut Lipenkov Andrey and Dima Yakovlev.
As a result of experiments it turned out that three pairs of wheels is what you need. And not just wheels, but is placed on moving the levers of the rocking. Turning the levers, you can change the ground clearance of the Rover from the March low to high, in which he stormed the met with an obstacle, alternately, like a beetle shifting through it, a pair of wheels. “Atlant” is able to overcome shallow rivers, to go on steep banks, crossing terrain dotted with boulders to get on the road.
Placing the wheels appropriately, the Rover will go up or down from the slope while maintaining the horizontal position of the body.
 Maybe someone will seem ridiculous the claim that wheel the machine can fly over the fence, but not young technicians from the laboratory of experimental modeling and design Cute Novosibirsk Akademgorodok. On the contrary, they talk seriously about the ability of the wheels to overcome ledges, ditches, steep slopes… And in support of their arguments build working models of all-terrain vehicles. One of them is remotely controlled amphibious Atlant — created by young designers Cut Lipenkov Andrey and Dima Yakovlev.
Maybe someone will seem ridiculous the claim that wheel the machine can fly over the fence, but not young technicians from the laboratory of experimental modeling and design Cute Novosibirsk Akademgorodok. On the contrary, they talk seriously about the ability of the wheels to overcome ledges, ditches, steep slopes… And in support of their arguments build working models of all-terrain vehicles. One of them is remotely controlled amphibious Atlant — created by young designers Cut Lipenkov Andrey and Dima Yakovlev.