
 The appearance in the USSR Armed Forces helicopter Mi-4 with a lifting capacity of 2000 kg originally destined to transport paratroopers, immediately attracted the attention of numerous security forces, and GVF. Was no exception and the Navy. Before him opened a wide perspective on the use of Mi-4 not only for the delivery of paratroopers, but also to perform search and rescue operations at sea, minesweeping, search of submarines (the threat of which is constantly growing) and as a torpedo bomber.
The appearance in the USSR Armed Forces helicopter Mi-4 with a lifting capacity of 2000 kg originally destined to transport paratroopers, immediately attracted the attention of numerous security forces, and GVF. Was no exception and the Navy. Before him opened a wide perspective on the use of Mi-4 not only for the delivery of paratroopers, but also to perform search and rescue operations at sea, minesweeping, search of submarines (the threat of which is constantly growing) and as a torpedo bomber.
First in 1953, created the anti-Mi-4M (there are designations Mi-4ВМ, VM-12). Unlike land of the Mi-4 And anti-submarine helicopter mounted radar SPRS-1 (“Kurs-M”) that is designed to search for submarines, were both above-water and submerged (at periscope depth) position, a set of 18 sonobuoys RGB-N IVA, lowered with a hand winch magnetometer APM-56, optical sight OPB-1S and up to 100 anti-submarine bombs PLAB-MK. Navigator-radar operator was located in the ventral gondola. On Board there was a aerial camera AFA-БА21С.
Mi-4M passed state tests and was recommended for serial production after elimination of the revealed defects. From 1957 to 1958 plant No. 387 in Kazan built 76 helicopters ASW Mi-4M. I must say that the use of these machines was not enough. They actually worked out different methods for search of submarines of the probable enemy, preparing personnel for future more advanced anti-submarine helicopters.
For this, as told to A. Artemyev, at first, the Mi-4M release and cleaning gondola with the magnetometer were carried out using a hand winch. To do this, the Navigator had received permission of the commander, go into the cargo compartment, install the winch handle and counting the revs, release the gondola, controlling her descent to the marks on the cable rope. Followed connect the electrical cable connector of the magnetometer. Only then began the search for the submarine. All this, including the rise of the magnetometer, time-consuming and require considerable physical effort. The flight speed of the helicopter and released the gondola was not to exceed 130 km/h.
To search for surface objects, including submarine moving at periscope depth with the device for operating the engine under water (RDP) at the shoreline, was intended very imperfect radar SPRS-1. The detection range of a submarine in this situation in calm, judging by the results of the testing locator does not exceed 20 km, and However calm the situation at sea is the perfect case, in fact, already at sea about 3 points detection range submarines did not exceed 5 km. SPRS-1 had another drawback — the very limited field of view and only forward. And when searching for the submarine angle scanning spot beam was limited to 150 degrees, when the direction finding of the target — not more than 30 degrees in the horizontal plane. There were difficulties with the recognition on the screen of the coastline.
Since 1957, the Mi-4M organization were formed into separate squadrons base helicopters PLO. In the same year, in accordance with the July 1958 decision of the government anti-Mi-4M equipped with sonar “Rion”, but further experiments did not get.
Two years later, on the basis of serial cars built in October was presented on state tests improved the basic anti-submarine helicopter, the Mi-4M radar “ruby-V”, sometimes referred to as Mi-4МР. In connection with the replacement of radar SPRS-1 for “ruby-V” has moved to another place, the receivers of air pressure sensors measuring the speed of flight, taxi and landing lights. In addition to the standard set proteininteractions and communication equipment, the helicopter was equipped with a set of sonobuoys RGB-N (18 pieces) — the main means of finding submarines, auxiliary magnetometer APM-56 with electric winch LPG-1 and the aerial camera AFA-БАФ21.
Like its predecessor, the Navigator was located in the ventral gondola with the device of emergency relief. In the end, all the modifications to the helicopter empty weight by 130 kg, and in the end decreased payload.
For anti-submarine warfare provided, in particular, bombs MPLAB-100, FAB-500 M-46, PLAB-5 00-300, ФАБ250МУ and ofab-100M. The maximum bomb load was for this option up to 1000 kg.
Leading on the stage of state tests was engineer P. Zakharchenko, and V. pilot Calihan. Tests of the Mi-4M, ended in the spring of 1960, showed that the car was almost equal to the technical conditions for the supply of helicopters in 1959 and the tactical and technical requirements of the air force and industry, to the radar device.
Suffice it to say that radar “Rubin-” after a brief debugging for reliability far exceeded SPRS-1. Sector review forward has risen to 250 degrees, although the rear hemisphere because of installed biological shielding is still not in sight. Station “ruby-V” allow you to confidently detect the coastline and major cities at a distance of 240 — 260 km, naval base — for 150 km and more, which together with the existing radio-navigation and communication equipment was allowed to fly in adverse weather conditions day and night, but when set for Mi-4 weather minimum. Surface ships such as destroyers were found on the removal of 150 km and submarines were at periscope depth and moving use RDP, — a distance of about 28 km.
Mi-4МР, although it was recommended for adoption at the armament as helicopter anti-submarine defense, but still required some refinement.
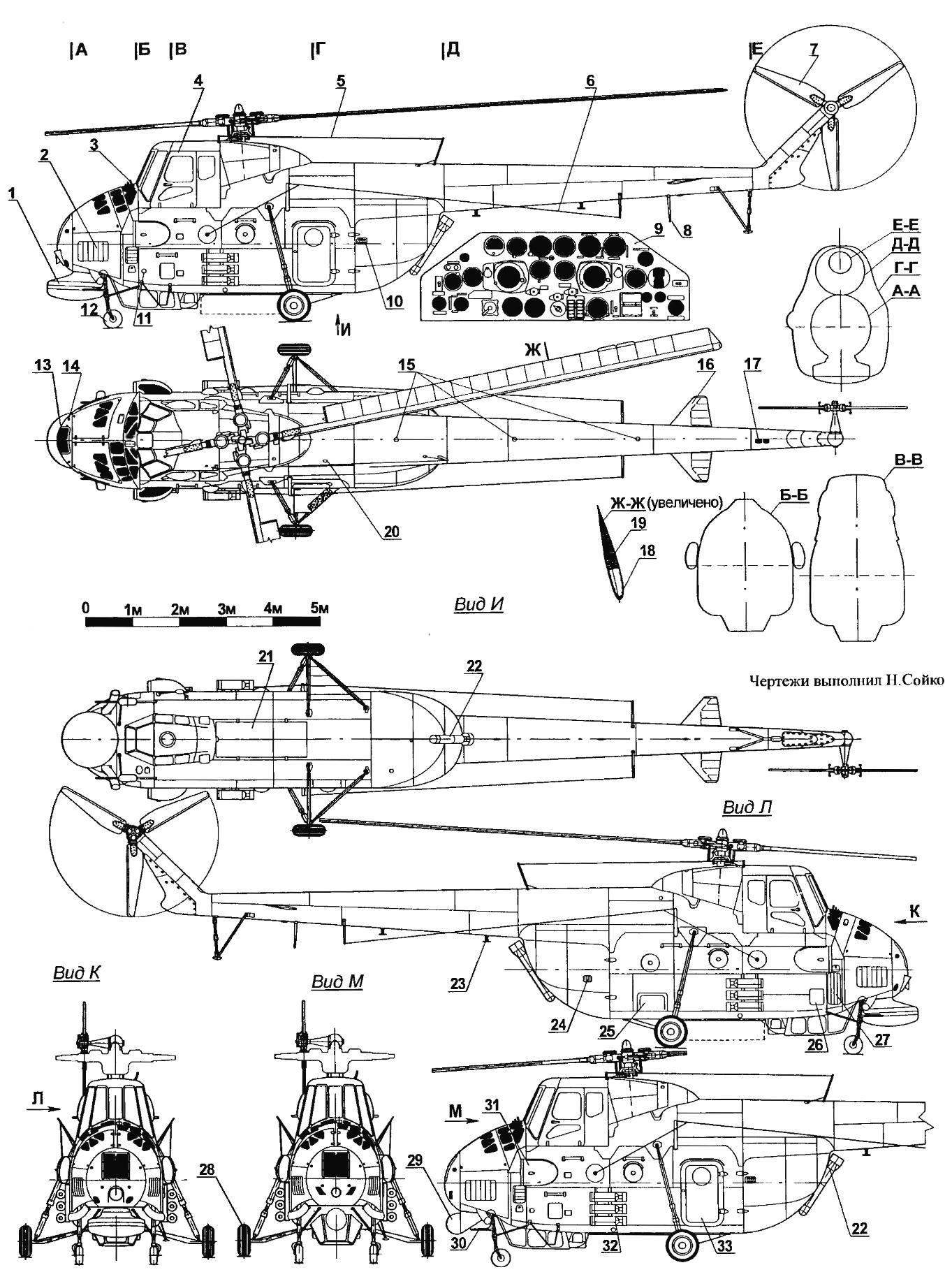
The Mi-4M:
1—Radome radar “Rubin -“; 2—fold adjustable hood; 3 — antenna IFF systems; 4 — sliding door; 5 — stub antenna of the radio compass ark-5; 6 — antenna HF radio; 7 — tail rotor; 8 — whip antenna radio RSIU-ZM; 9 — instrument panel prototype of the Mi-4M; 10—cassette flares; 11—socket airfield power SRP-500; 12 — wheel 400×150 mm; 13 — air intake of the engine; 14— antenna IFF systems; 15 — front lights (purple); 16 — controlled stabilizer; 17 — louver cooling of the intermediate gear; 18 — the spar of the blade; 19—honeycomb; 20 — on-Board air navigation light (red); 21 — fold hatch of the bomb Bay; 22 — drop the buoy GUS; 23 — antenna radio altimeter RV-5; 24 — fold ventilation of the cargo compartment; 25 — benzodiox; 26 — the hatch of the battery compartment; a 27— fold adjustable oil cooler; 28 — wheel 700×250; 29 — radar Radome “Kurs-M”; 30—rod LDPE; 31 —air intake; 32— bombs OMAB-25-12D; 33 — front door
In March of 1961 part equipped with these helicopters and the aircraft be-6 was renamed in anti-submarine, next year the plant in Kazan built the first 10 Mi-4M radar “Rubin-In”.
Advanced machines are additionally equipped with sonar, a magnetometer APM-60 (adopted in 1960) with greater detection range of submarines, compared with APM-56 and autopilot AP-31, but many pilots did not venture to turn it on in flight. Two years later, the helicopter was adopted. Feature of anti-submarine helicopter was was separated in an emergency, the cockpit of the Navigator.
In the same year based on the December decree of the government began to develop the export version of the Mi-4МЭ intended for export to countries friendly to the USSR. The shape of the car remained the same, but the hardware has changed significantly. Instead of radar “Rubin” set RBP-4G aircraft interrogator-responder, SRZO-2M was changed to the defendant SRO-1 “Barium”, again in the export performance. With the machine removed the autopilot and the part of bomb armament.
State tests of the Mi-4МЭ ended in March 1964 and in the same year, they began to leave the Assembly plant of the production plant. Export Mi-4МЭ can be found on the ground in Poland and the GDR. In the German Democratic Republic in 1965 — 1966 set of four anti-submarine helicopter under the designation Mi-4MA. They were in use until 1977
Based on the Mi-4M in 1963 built the first domestic helicopter torpedo Mi-4T. Helicopter to facilitate removed of the radar, ASW equipment and the autopilot. The fuselage has posted a double container for circulating anti-submarine homing torpedo at-1 with bomb rack, insulated container for sonobuoys RGB-NM Chinara and a retractable antenna device SPARU-55, intended for the reception of signals at a distance of 60 km. In this regard, had to change the chassis design.
Mi-4T could be used not only as a torpedo bomber, but bomber. In addition to an optical sight for daytime bombing OPB-1P mounted night COMAR-7, updated radio communication equipment. At the same with the Mi-4M flight weight due to the increase in fuel range of the helicopter increased from 246 km to 500 km, a bomb load — from 246 to 520 kg.
In 1955 he built a minesweeper Mi-4БТ with inflatable ballonets chassis to allow for not only the takeoff and landing, but towing through the water.
It is obvious that the probability of detection and destruction of submarines with the help of the Mi-4M and its later modifications left much to be desired.
Then on the Mi-4 has conducted a number of studies aimed at substantiation of requirements to anti-submarine helicopters and their equipment. In particular, investigated the possibility of using a drop of hydroacoustic station (GUS) AG-19 “Kliazma”, which allowed to determine the direction of the noise source, which was adopted into service in 1959 As the Mi-4 had just wheeled chassis, for use GUS the helicopter was hovering at a given point over the sea and dropped the receiver of hydroacoustic station at the estimated depth. In the absence of noise a submarine of the enemy helicopter flew to another area and the search continued.
In the beginning of 1960-x years of AG-19 were installed in the helicopters, but it has not been used. The reasons for this were several. But the greatest difficulty was in keeping the helicopter over a selected point. For example, the descent of the car below 18 — 20 m (the definition was complicated by the absence of a radio altimeter happened to the eye) led to splashing it with water, and the displacement in one direction or another distorted the direction of the noise source. And the range of DF left much to be desired.
Flight studies showed that the most favourable hydrological conditions, the detection range of diesel submarines, which had a speed 5 — 6 knots and towing the buoy to increase the noise did not exceed 0,5 — 0,8 km away and the Numerous failures of hydro-acoustic stations, including failure of the receptor, the tightness of the connection cable-rope stations, etc., showed that the station is almost unusable.
On the Mi-4 in experimental flights, perhaps earlier than in some other countries, were tested ways of receiving fuel from Navy ships in hover mode. For this purpose, the tanker has established a special filling of the site, and helicopters — additional equipment for the reception of fuel. The pumping speed was reached 500 — 700 l/min proprietary design, unfortunately, has not received further development.
A brief technical description of the Mi-4
Metal Mi-4 is made in a classic single-rotor scheme. A tapered semi-monocoque tail boom of circular section had rejected up the beam of the tail rotor.
The rotor is four-bladed, hinged blades and friction dampers. 1960 was produced with all-metal blades of rectangular shape in plan.
Three-blade tail rotor with a diameter of 3.6 m had wooden blades trapezoidal shape in plan.
The drivetrain consisted of three reducer: with freewheel, intermediate and tail rotor, connecting shafts and brake rotor. The speed of rotation of the rotor at takeoff 198 rpm, the nominal mode 178 rpm.
The power plant consisted of a piston radial two-row 14-cylinder engine AL-82B takeoff power of 1,700 HP with forced air cooling. A motor housed in the forward fuselage, the sides of which are mounted air intakes of air cooling.
Fuel was filled in soft tested fuel tank capacity 1000 l, located in the Central part of the fuselage. For ferry flights in the cargo compartment is installed an additional tank with a capacity of 275 liters, the oil system consists of a single tank capacity of 65 litres and an oil cooler cooled by air from the fan motor.
Control system the helicopter had a hydraulic in all four channels with the spring loading mechanisms.
Chassis — four-post, fixed gear with maslanopodobnaya shock absorbers and brake wheel dimensions 700×250 mm. Front legs with swivel wheels dimensions 400×150 mm, at the end of the tail boom at the bottom is a safety tail wheel with an air shock.
The helicopter crew consisted of 3 to 4 people.
Key features of the Mi-4МР
Length, m…………………………………………………………………..25,02***
Height, m………………………………………………………………………5,18
The diameter of the rotor, m………………………………………………21
Take-off weight, kg:
normal…………………………………………………………………7273
reloading……………………………………………………………..7800
Empty weight, kg………………………………………………………….6153
The maximum speed, km/h………………………………………..185*
Dynamic ceiling, m……………………………………………..5000
The climb 3000 m, min…………………………………..16
The flight duration, an hour.-min………………………….2-52**
*Normal flight weight. **At altitude 1000 m. With additional fuel tank in the fuselage the flight duration was 5-35. ***With rotating screws.
N. YAKUBOVICH
Recommend to read
 DEFENDER RADIO
DEFENDER RADIO
The proposed device is designed for "soft" on various radio and electrical household AC voltage of 220 V it is Known that the moment of switching devices containing a primary or... THE GRIP AT
THE GRIP AT
What would be a good tool or even the machine had craftsman in the house, just drill a hole or accurately process the workpiece by holding it with pliers, and even more in the hands of,...
