Is it really necessary to divide transport into urban, intercity, off-road? Wouldn’t it be better to create some kind of universal one that could be used everywhere?
It must be said that there have been many such attempts throughout the history of technology. But life shows their failure. The search for something universal, suitable for all occasions, is doomed to failure in advance, like the dream of a panacea—a cure for all diseases.
The only universal type of “transport” for humans since ancient times has been… their own feet. Even the horses, bulls, deer, and other “transport” animals tamed by humans immediately received their specialization: cargo or riding, for mountainous terrain or deserts, etc.
That is why before looking into the future of urban transport, let’s see what features and typical characteristics are inherent to it, distinguishing it from other types? Despite the fact that urban transport can be not only ground-based, but also hidden under the city or raised above the streets, it has common characteristics.
For example, it does not face the problem of off-road conditions, refueling, etc. There are also more significant features for design prospects. Thus, urban transport has a limited range. If it is a passenger car, it is mostly used for commuting to work. A bus, trolleybus, metro trains, after traveling a relatively short distance, return to the starting point. This means that the path of urban transport between possible points of replenishing energy costs is limited.
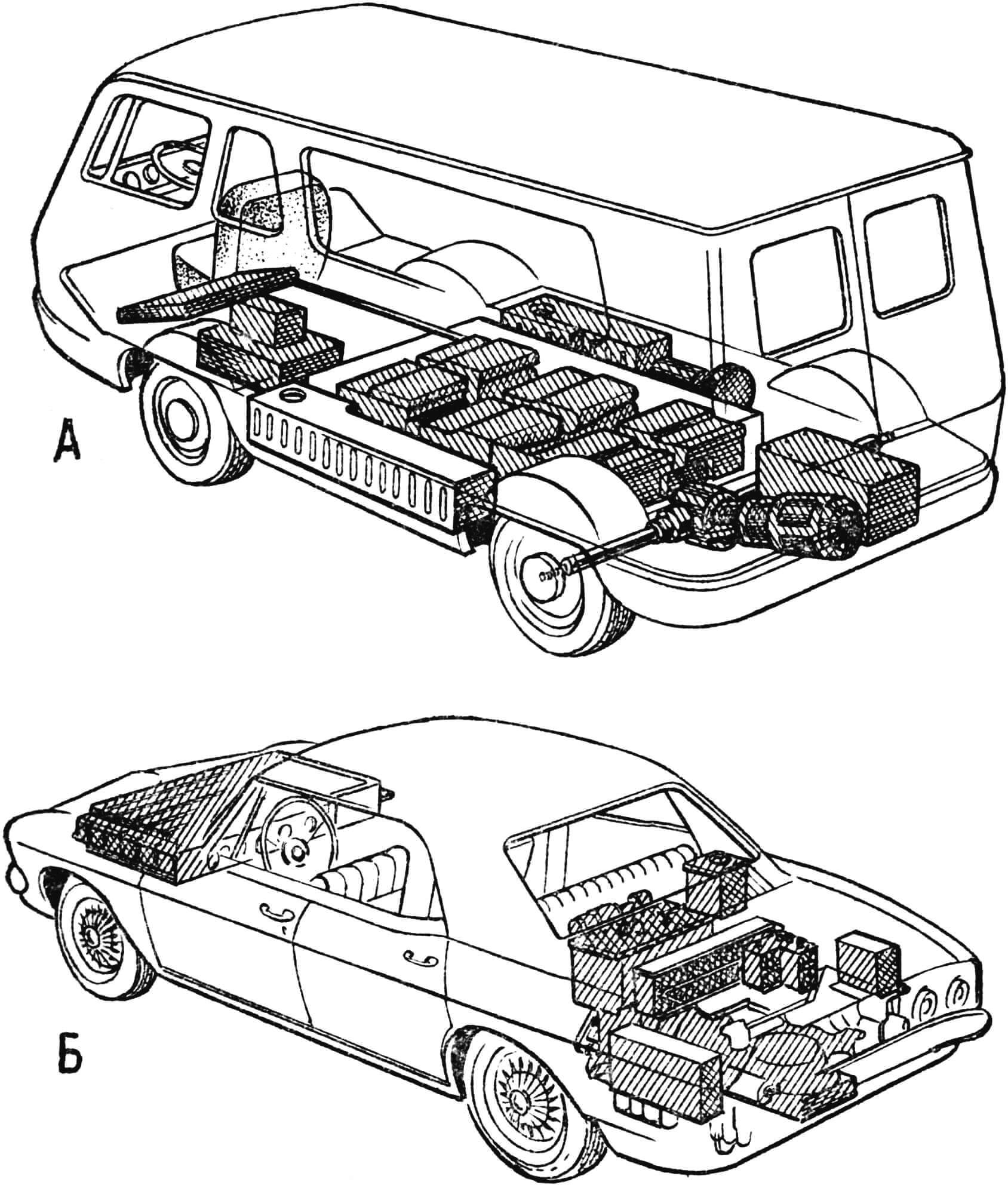
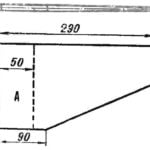
A — van, B — passenger car.
Furthermore, all vehicles within the city are characterized by frequent acceleration and stops. A bus, for example, stops on the route on average every 300 m. This dictates its own conditions—say, the intensity of acceleration and braking.
Individually owned cars must be compact, maneuverable, economical, and together with public transport—which is very important—not polluting the atmosphere with harmful emissions: for urban transport, this requirement is an especially acute problem. The existing electric transport satisfies this, but it is tied to its route and has other disadvantages.
What paths will the development of urban transport take? First, a decisive role will be given to its public types. At one time, many capitalist countries, especially America, focused on individual transport in cities and in recent years have been forced to urgently correct the situation. This is understandable: the capacity of a bus relative to the area it occupies is incomparable to individual cars, not to mention the congestion of the roadway with them.
What changes will public transport in tomorrow’s cities undergo? First of all, they will undoubtedly affect the engine. It must become maximally economical and harmless. This is where engines on accumulated energy and hybrid engines will come to the rescue.
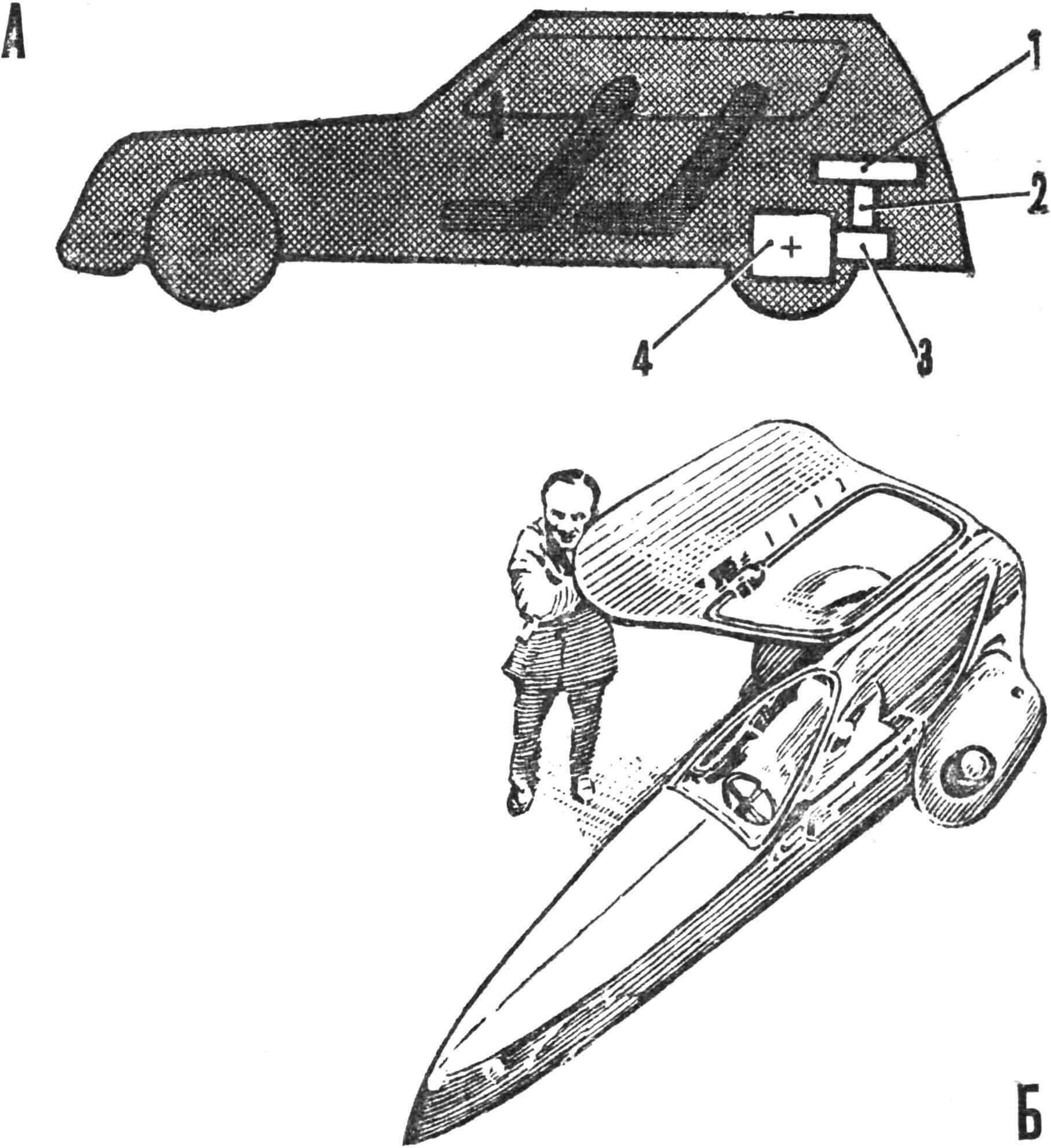
A — diagram: 1 — flywheel, 2 — clutch, 3 — reducer, 4 — variator combined with differential; B — general view of D. Rabenhorst’s flywheel car (USA).
The promising transport will obviously be the electric car. In the last 10—15 years, the press has often turned to machines with a similar energy source. However, so far they have not been able to displace internal combustion engines. And not by chance—the new transport still has many unsolved problems.
How is an electric car constructed? Its main part consists of batteries or other sources of electrical energy, for example, fuel cells. The car’s wheels are driven by an electric motor, one or several; the power unit can also be built into the wheels themselves, forming the so-called “motor-wheel.” The main difficulty designers face is connecting the engine and current sources with the control system: it is still quite complex.
How are the motors of existing urban electric transport—trams, trolleybuses—controlled? Mainly using rheostats: resistances are introduced into the circuit—the speed decreases, removed—the speed increases. But such an “old-fashioned” method is unsuitable in modern conditions: after all, rheostats convert the most valuable energy into waste heat. So, should we also convert the energy stored in batteries into heat on electric cars? Other methods are needed here, and they have already been found and even started to be applied in urban transport. We are talking about the so-called thyristor control systems. The essence of their operation is that they send current to electric motors not gradually, but in separate pulses: the greater such a “push,” the faster the motor rotates. Speed regulation in this case occurs without significant energy losses.
But there are many other problems. For an electric car to become a real urban transport, unlike, say, an electric cart, it must have intensive acceleration, quick acceleration, otherwise it simply will not “fit” into urban traffic with its frequent braking at traffic lights. And if, for example, for an electric car the size of a “Zhiguli” to move on a flat road at a speed of 60 km/h, a power of about 4 kW is needed, then to accelerate to the same speed with an acceleration of 2 m/s², a power ten times greater is already needed! Of course, batteries cannot yet provide such high power. Therefore, promising electric cars are provided with small super flywheels that allow developing enormous power during acceleration. And during braking, they, as already discussed in our magazine, accumulate (recuperate) the kinetic energy of the car, which allows almost doubling the range of an electric car on a single charge.
The control of such transport will be assisted by a microcomputer the size of a matchbox, which switches on the batteries and flywheel at the right time. This will help use the accumulated energy with maximum efficiency.
Of course, urban cars with internal combustion engines are not going to give up their positions. I have already spoken about the fact that if these machines are equipped with small super flywheels, needed, as in the previous case, only for braking and acceleration, then fuel consumption can be almost halved. But the main thing is that the total harmfulness of exhaust gases will be reduced several times. Such cars will become more harmless to cities.
In recent years, thanks to the efforts of scientists and engineers, it has been possible to create super flywheels that are not only suitable for pairing with other engines, but also capable of competing in the amount of stored energy with electric batteries. And it is already possible to convert to flywheel traction if not all urban transport, then at least buses and taxis.
Flywheel cars have an undeniable advantage: quick acceleration. The speed of such machines can be very high even on climbs. Such a vehicle would become promising for the city also thanks to its compactness, responsiveness, additional volume in the cabin—after all, the flywheel takes up little space. These features make forgivable its main—though comparative—disadvantage: less long range between recharges. If for electric cars it is expected to be within 300 km, then for flywheel cars this figure will be about 100—150 km. But the first will have to “recharge” for at least 6 hours, while the flywheel one—only a few minutes. Recharging stations for flywheel buses could be located at terminal stops.
Speaking about urban means of transportation, one cannot fail to mention the metro. This is perhaps the most convenient and popular transport of large cities. That is why especially many proposals and technical developments are devoted to how to ensure maximum convenience and speed of underground passenger transportation. It is proposed, for example, to convert metro trains to pneumatic wheels—to reduce noise. However, this would hit the economy of the metro: pneumatics have much more resistance to movement, they are more expensive and less durable than steel wheels. Ideas were expressed: to increase capacity, increase the number of cars in a train, which will become longer than the platform, with its own certain group of cars stopping at different stations.
But more important, of course, is to improve the metro train itself. And such experiments are already being conducted. For example, in New York, several metro cars equipped with a flywheel regenerative braking system are being tested. After all, underground trains only accelerate and brake, losing most of their energy on this. In the new cars, the braking system has a flywheel connected to the motor-generator shaft. When braking, the traction motors are switched to generator mode and supply current to the motor-generator, which accelerates the flywheel to 14 thousand rpm. The kinetic energy of the car is, as it were, absorbed by the flywheel, and the car stops. And during acceleration, everything happens the opposite: current from the motor-generator, rotated by the flywheel, powers the train’s traction motor. The flywheel rotation slows down to 10 thousand rpm. In case of a power supply system failure, the flywheel can help the train reach the next metro station.
However, the motor-generators of the American regenerative braking system are very heavy, expensive, and have low efficiency. It would be more expedient to use discrete belt variators developed in our country, described in one of the previous articles (see “M-K” No. 5, 1980), which would simplify the device and increase the efficiency of the recuperation system. The flywheel in this case would be connected by a variator directly to the motor-car reducer, bypassing the electric motor. The system control can be easily automated by installing electrical contacts on certain sections of the line. Then, regardless of the train’s speed, it will be able to stop exactly at the designated place of the station—such is the property of a discrete variator: a constant number of belt turns in the coil, and therefore, the number of wheel revolutions of the train from the beginning to the end of the mechanism’s operation.
Recently, many technology forecasters have been considering the future of urban transport from completely unexpected angles. For example, in connection with hypodynamia—a disease inherent to city dwellers: we are talking about a sedentary lifestyle, a lack of physical activity. Here, the experience of creating means of transportation using muscular power attracts attention.
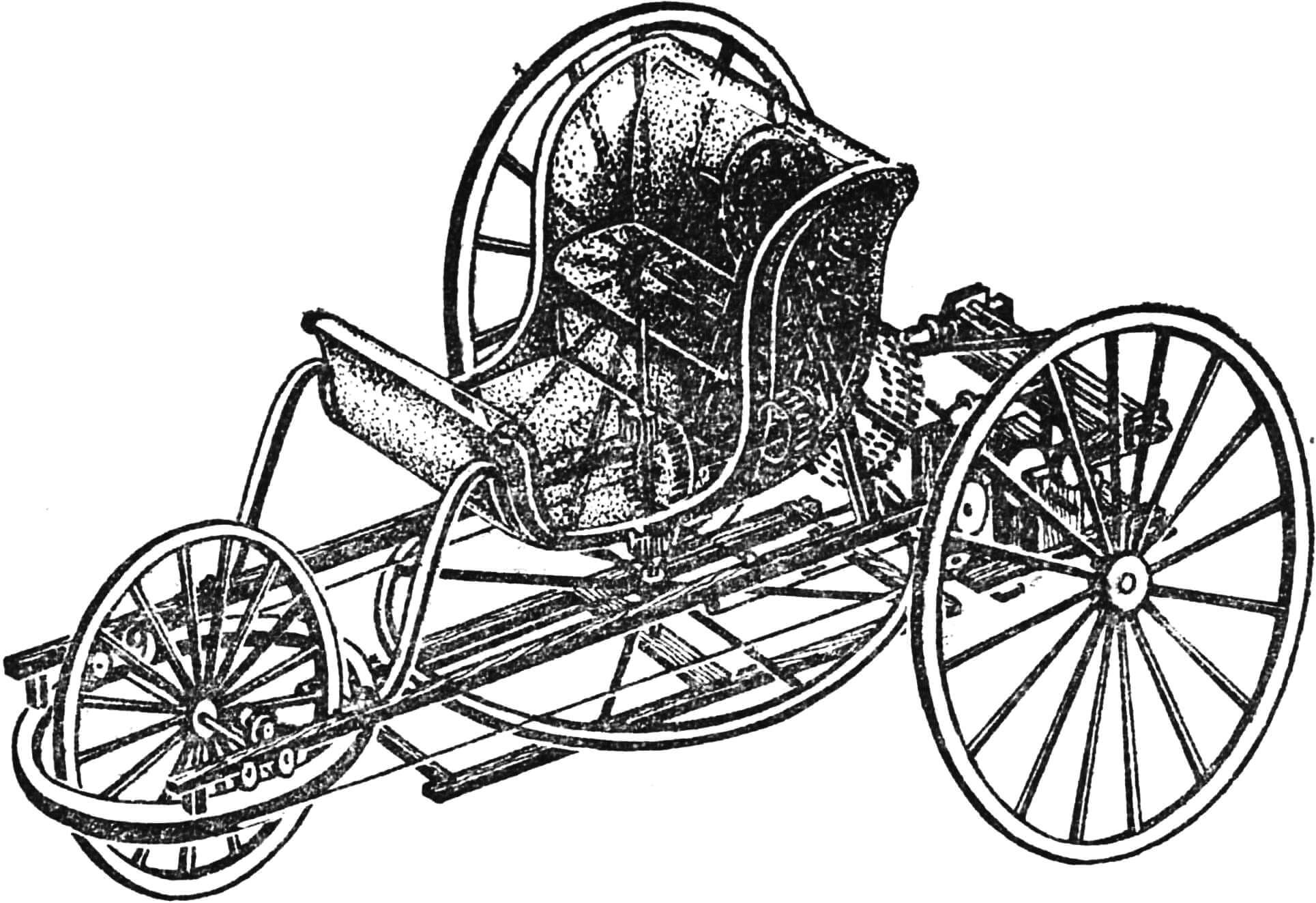
Such carriages appeared in Europe about five hundred years ago. They were driven by levers or pedals. An interesting design of such a carriage, driven by a servant located on the footboard, was built in 1791 by the Russian mechanic I. P. Kulibin. His pedal two-seater carriage contained an element of super-modern transport—a flywheel accumulator and regenerative brake.
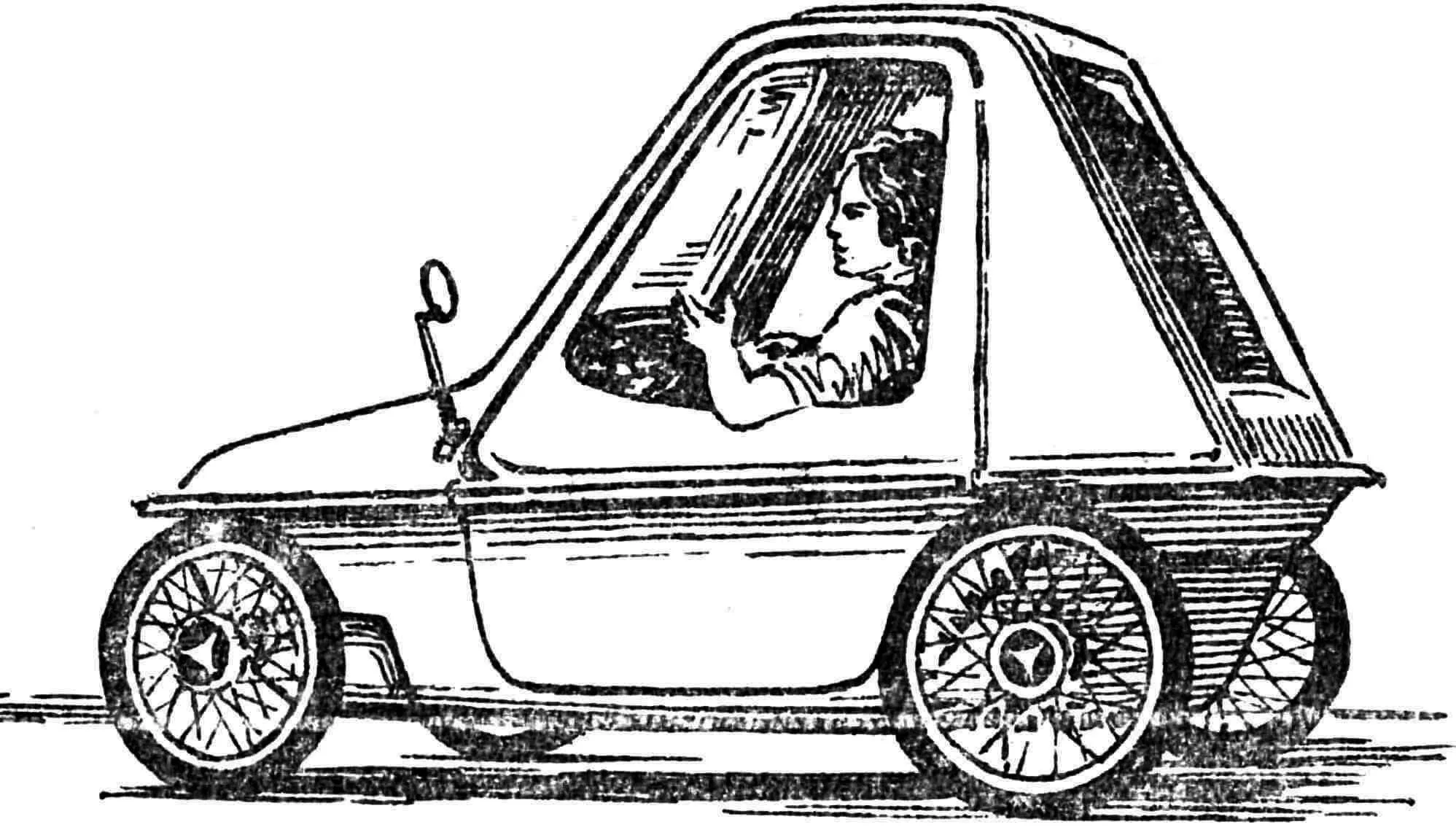
Many years passed, and Kulibin’s invention was revived again, of course, taking into account modern achievements of science and technology. These are pedicars—pedal cars, or velomobiles, allowing travel at speeds of about 30 km/h with muscular energy expenditure no greater than when walking. The magazine has already described similar designs created by enthusiasts of such technology here and abroad. As a rule, the pedals in them are fixed on vertical rods descending from under the shield, like pendulums. The pedal stroke is small, but it allows perceiving the force of the legs to the fullest. And thanks to the fact that the driver’s back rests against the seat, the force on the pedals can be twice the weight—a great advantage compared to a bicycle.
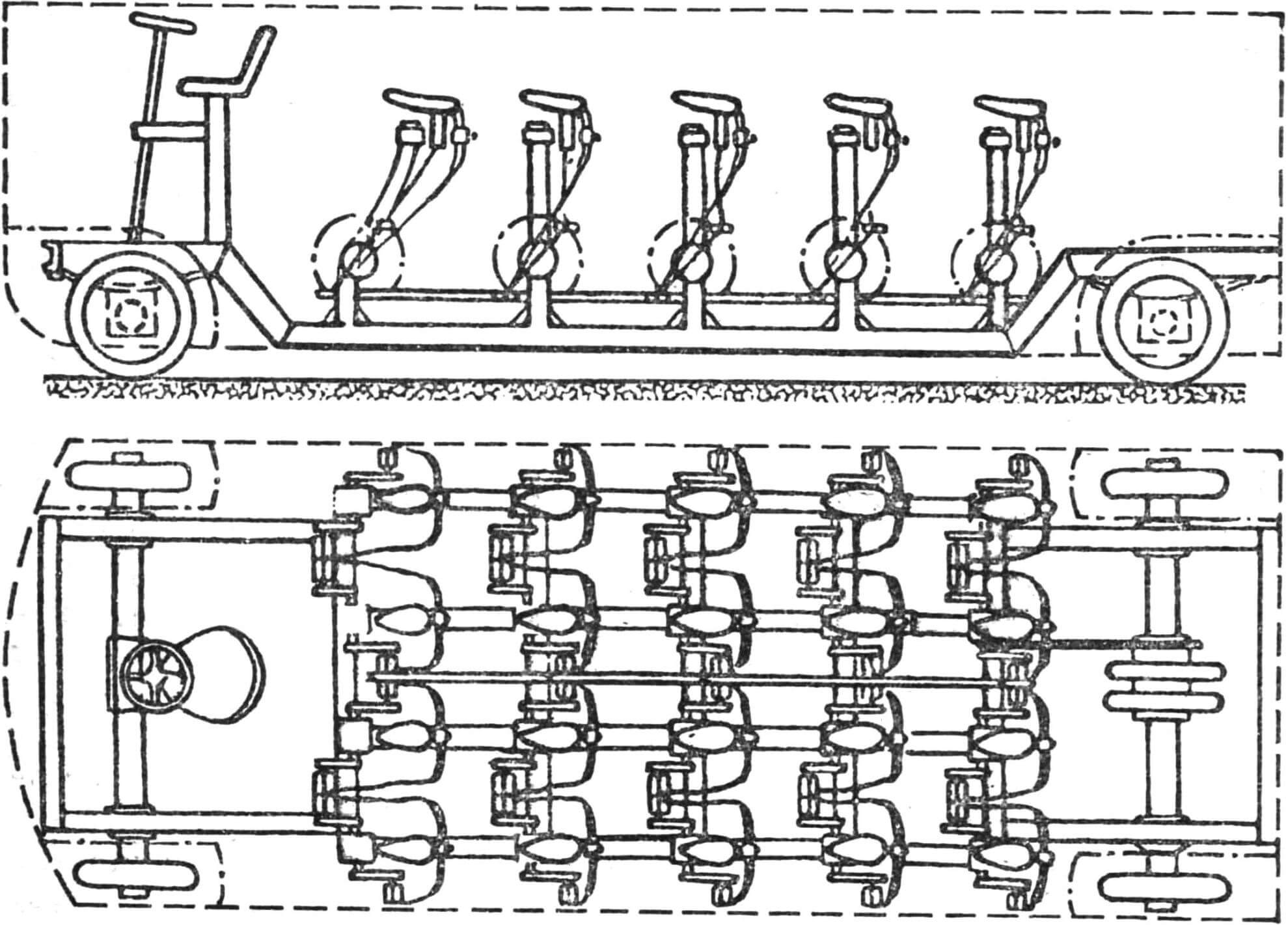
A pedicar can also be multi-seat—like a minibus. The French inventor P. A. Farsa proposed a design for such a velobus for twenty people. In it, instead of seats, there are bicycle saddles in five rows, with pedals below. Each row has its own shaft, from them the total force is transmitted through the transmission to the driving rear axle. The only passenger “freed” from pedals is the velobus driver: he controls the movement, presses the clutch, brakes.
It is curious that the idea of a velobus was proposed by the Soviet humorist Mikhail Zoshchenko. Here is what he wrote in his miniature “Train Maxim Maximovich”: “It’s time to use the power of passengers one hundred percent. Many passengers idly travel to their destination, despite the acute high cost of fuel. Here we give a longitudinal section of our project. The active work of passengers is clearly visible… Huge fuel savings! Complete absence of soot and smoke!”
If the experts of the French patent office had read Zoshchenko, it is still unknown whether patent No. 952354 for “Public means of transport driven by pedals” would have been issued in 1949!
N. GULIA, Doctor of Technical Sciences
Recommend to read
 FOUNTAIN PEN PAPER
FOUNTAIN PEN PAPER
Simple and beautiful ball-point pen can be manufactured in a few minutes, if there is a rod with pasta and... a colourful illustration from a magazine or just a sheet of paper. For this... HELPS HYBRID
HELPS HYBRID
Considering the number of characterizing a working volume of cylinders of internal combustion motors produced by our industry, necessarily pay attention to the typical "failure"....
