 In our days people are rapidly penetrates into the remotest corners of the earth, where not only no roads, but the leg of the Explorer never set foot. Surprisingly, in its long history, we are not a success to learn more of the sushi. And it carries in itself the untold riches that nature hides in forests, jungles, inaccessible cliffs.
In our days people are rapidly penetrates into the remotest corners of the earth, where not only no roads, but the leg of the Explorer never set foot. Surprisingly, in its long history, we are not a success to learn more of the sushi. And it carries in itself the untold riches that nature hides in forests, jungles, inaccessible cliffs.
But to get into most of these areas are not under the power of any of the existing vehicles. And is man to rely on their own legs or on the help of ancient four-legged assistants — horses, camels, bulls. Where here the normal wheel to compare with real walking “mechanisms”!
However, whether here lies the answer to the question about the future of all-terrain vehicles! After all, it is tempting to build a special walking cars-trucks that cross could compete with a human or an animal. Suffice it to recall the mountain goat with his breathtaking jumps over a precipice or “bezdarnosti” some bug. I wish to study it and the car.
Fantasy! No. The real “walking” mechanisms today make the first, albeit timid, steps.
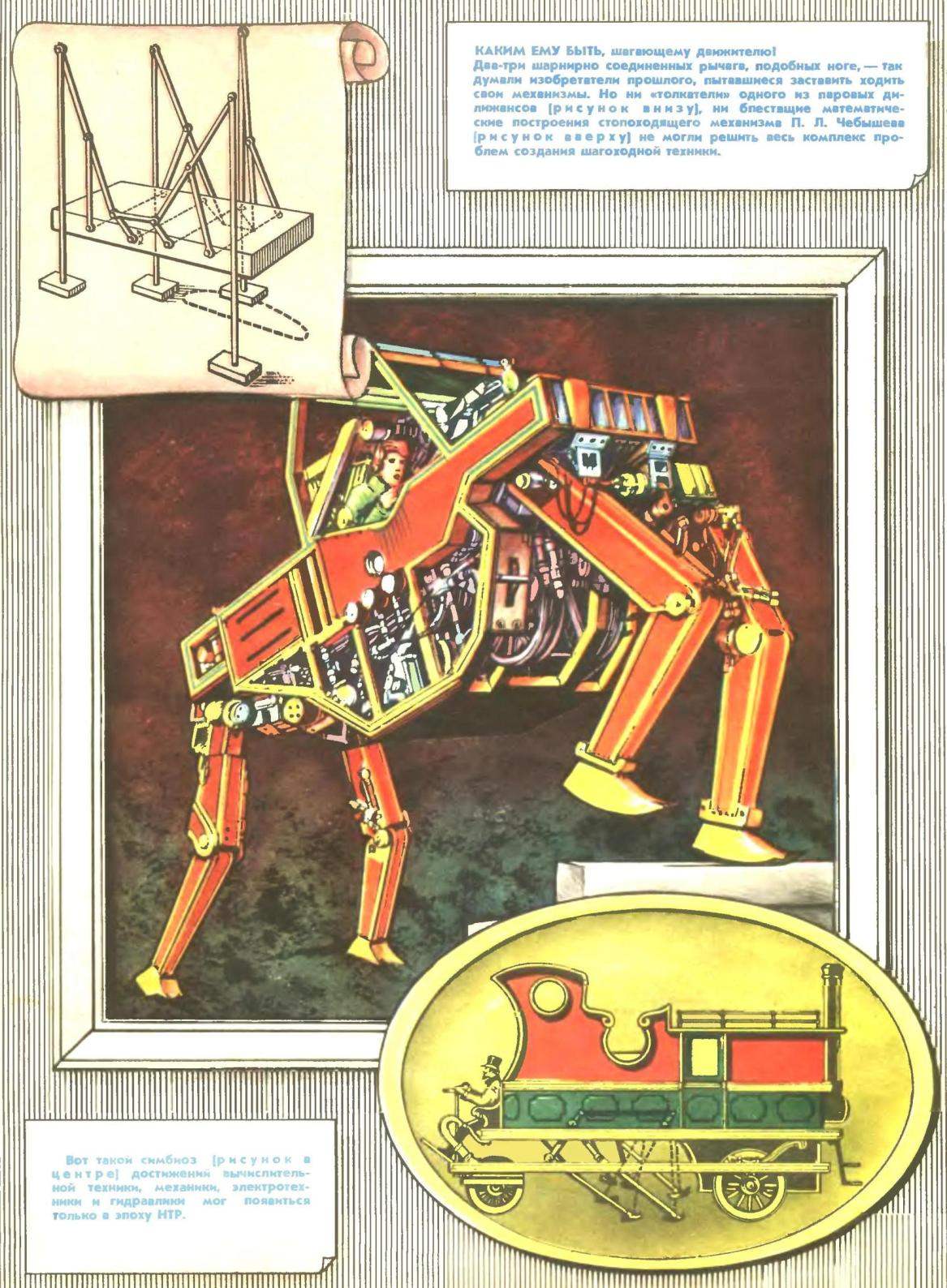
Nature gave man a genius invention. And the best example is the emergence of walking machines. However, the inventors of the past did not progress beyond the projects or primitive models. Alas, that was then the state of the art. The fact that, in addition to the navigation apparatus, the living entities endowed even mind that allows them easily to pass where the car gets stuck, choose a place to put your foot, measure the length and height of the step. That’s why the creation of a “reasonable” mechanical copies of animals or humans was possible only with the emergence and development of such scientific fields as bionics, electronics, computer science and hydraulics of high pressures.
The most important advantage of walking systems — the amazing adaptability of them to any track irregularities, cross almost any terrain, high maneuverability, which is impossible for any of the other types of all-terrain propulsion.
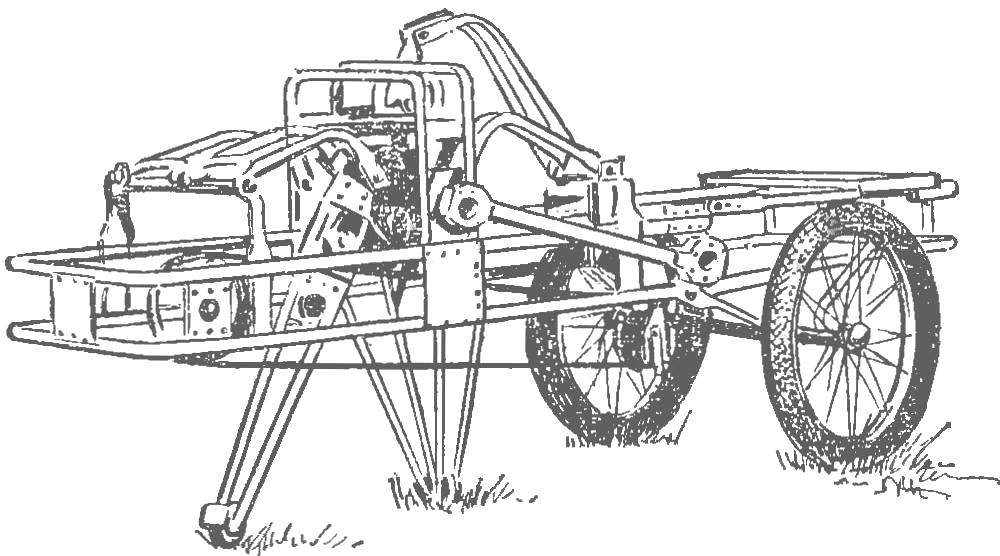
Fig. 1. Trying c truck driver I. Lyagushi.
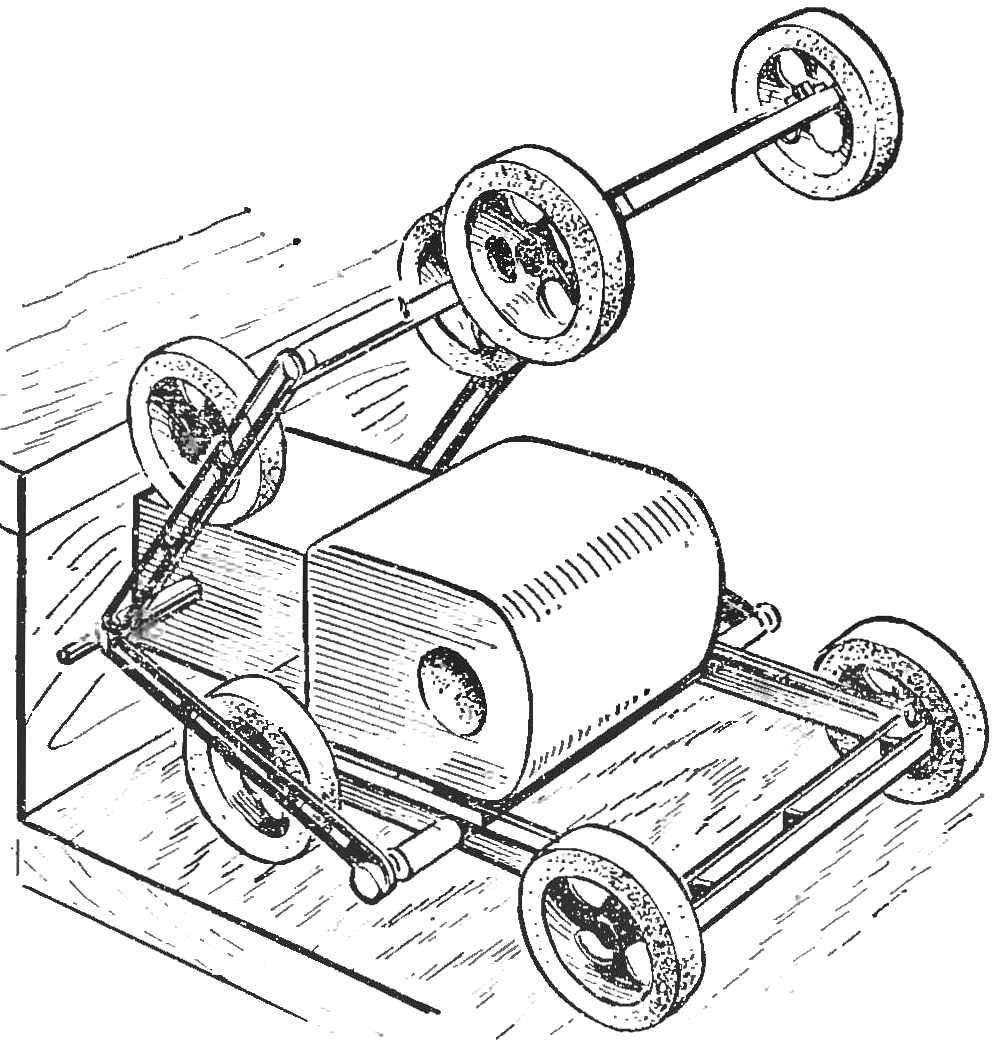
Fig. 2. Wheeled-walking mechanism.
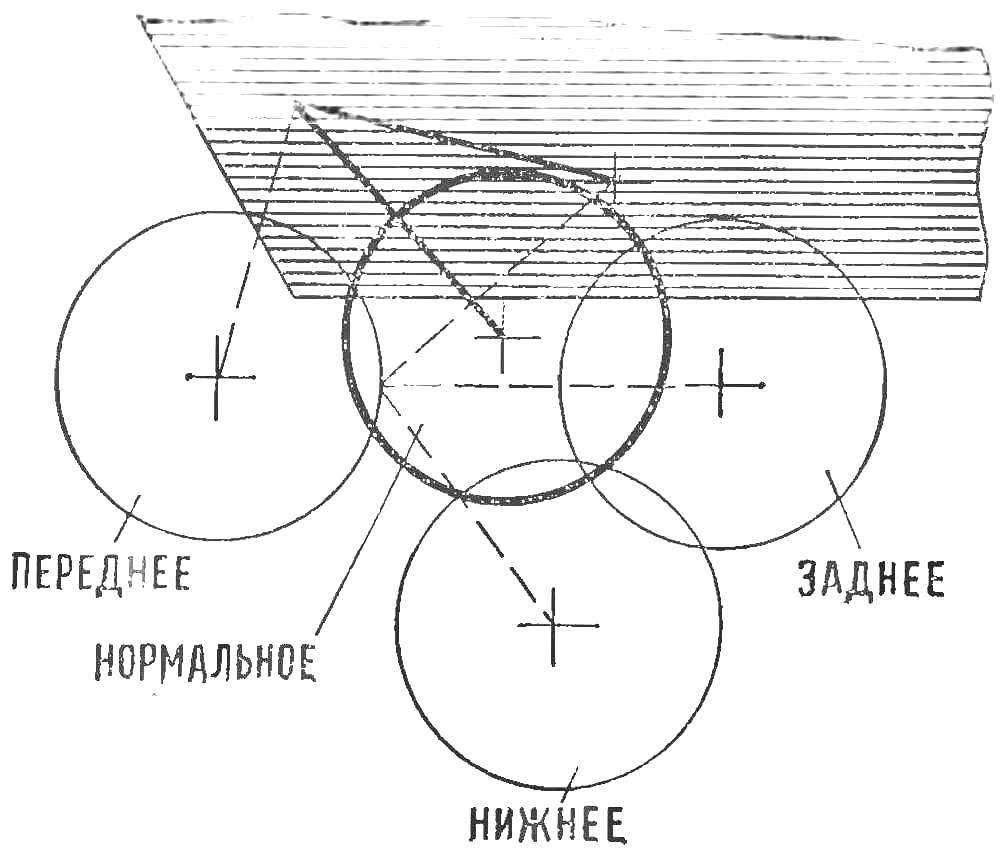
Fig. 3. The principle of setting the leading wheels of the vehicle at the ends of the longitudinally oscillating balance wheels.
But living and walking “mechanism” is faulty from the point of view of requirements of modern transport. The efficiency of his bail, and particularly at higher speeds. Just remember that each step is accompanied by rhythmic accelerations, decelerations and stops his feet at the time of its contact with the ground. If normal means of transport when moving the position of the center of gravity does not change, many walking mechanisms with each step, he ranges up and down, the body moves with acceleration and deceleration, which unproductively consumes precious energy. And, of course, walking propulsion is much more difficult and more expensive than normal wheels. These contradictions, overcoming them — the theme of the development of many designers.
A long and difficult path of walking to the car. They develop in two main directions: combined or transitional models of ATVs, which use only some elements of walking, and walking machines. The first group, the idea of designers, should combine all the best qualities and wheeled, and tracked and walking machines.
The world’s first use of the walking mechanism on a self-propelled carriage was not related to described its advantages. In 1824, Englishman David Gordon built a three-wheeled steam-coach (see box) with special “feet”. The inventor for some reason did not believe in the possibility of wheel mover, and therefore built a complex system of six “feet”, driven by a steam engine. In alternate contact with the road “legs” are repelled from it, telling the crew forward motion.
Interest in the problem of the walkers and the famous Russian mathematician P. L. Chebyshev. In the late nineteenth century he built a model of a “plantigrade machine” on four “feet” (tab), driven by a special system of levers. When moving each “leg” described the trajectory like movement of the legs of a man. This model served as the prototype of “trajectory” trends in the development of walkers. The designers of these machines try to copy the movement of a person or animal, choose the most optimal scheme of transportation “legs” of the mechanism. For example, amerikanski inventor George. Sigpi proposed construction of a walking apparatus, the two “legs” which make movement trajectories, which is an oval. Or, for example, in the design of passenger trolleys, walking mover, the Soviet inventor I. Lyagushi from the city of Lisichansk (Fig. 1) programmed a more complex trajectory “legs”, which is also oval. These walking machine with a pre-laid in them the program of the movement “legs” go blind, not adapting to conditions of terrain, and can move only on smooth roads or in certain conditions. And of course, this is not the solution.
Designers another direction in the development of walkers — modeling — has set itself a more challenging task-to create a walking machine in the image and likeness of the living “arrangements” with a copy of their mechanics. However, from a technical point of view, they are extremely uneconomical, and the modeling of living beings can only partially. For example, Walker S. the Italian Muratori four “legs” is the cylinders, which is a sad imitation of the legs of the animal. In connection with these, such mechanisms do not yet have practical meaning, and exist only in the form of models. More or less acceptable walking apparatus alternately operating with eight “legs” built in California during the development of the problems associated with finding the most optimal designs of new all-terrain vehicles to travel on the moon. He walked is a kind of chair for a single person and has already found practical application in clinics for sick children. The machine has a high maneuverability, good speed, can climb the terraced obstacles such as stairs.
Many interesting solutions have models of walkers, built by students of MVTU named after Bauman and Moscow state University, some of these innovations could be seen in action at the exhibition NTTM-76 (see “M-K” № 10, 1976). Great opportunities provides “shagayka” Leningrad engineer V. Lobacheva, whose centre of gravity does not change when moving the mechanism. Curious designs of walking models built young inventors — they regularly reported on the pages of our magazine.
Curious walking the car was built by a German firm at the beginning of our century. It was the truck, moving slowly and heavily to his feet-runners. Here we see him in old newsreels footage clumsily crawling in a puff of smoke out of the garage. The fate of this machine is unknown, however, in that time, the gimmick had no support. Indeed, a clumsy apparatus, not only could not move on the road, but on roads that “go” with great difficulty.
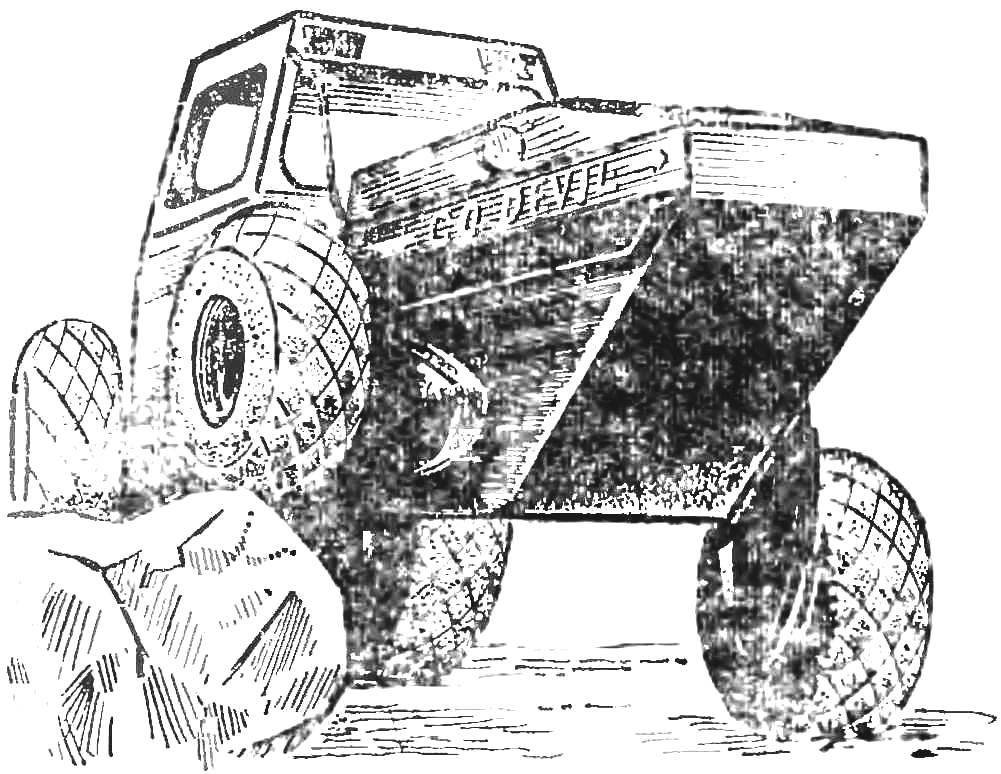
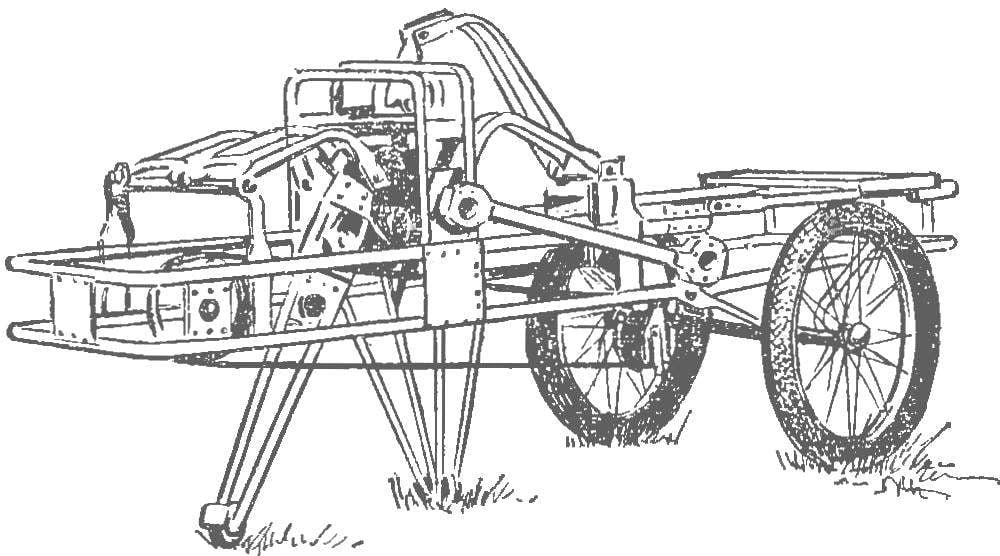
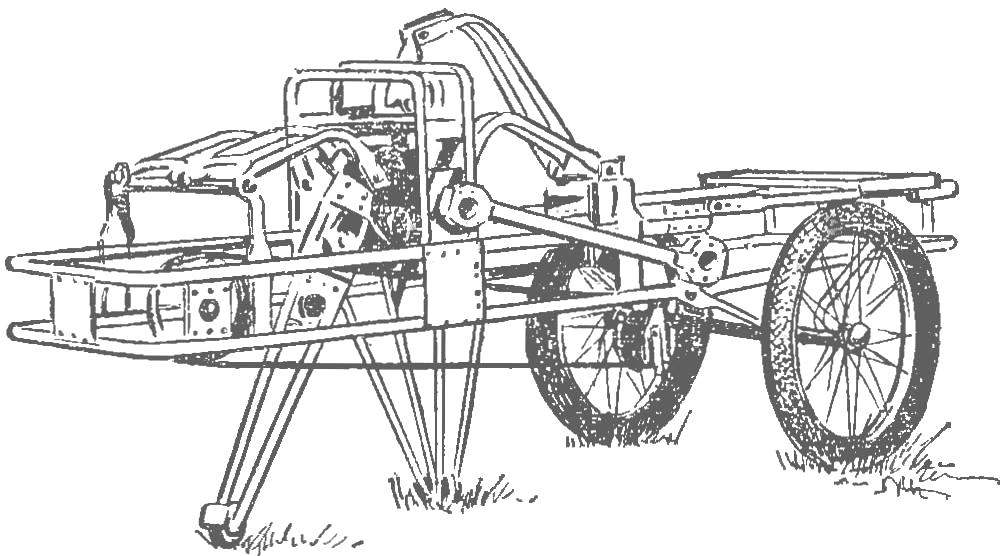
Fig. 4 Wheel walking Rover.
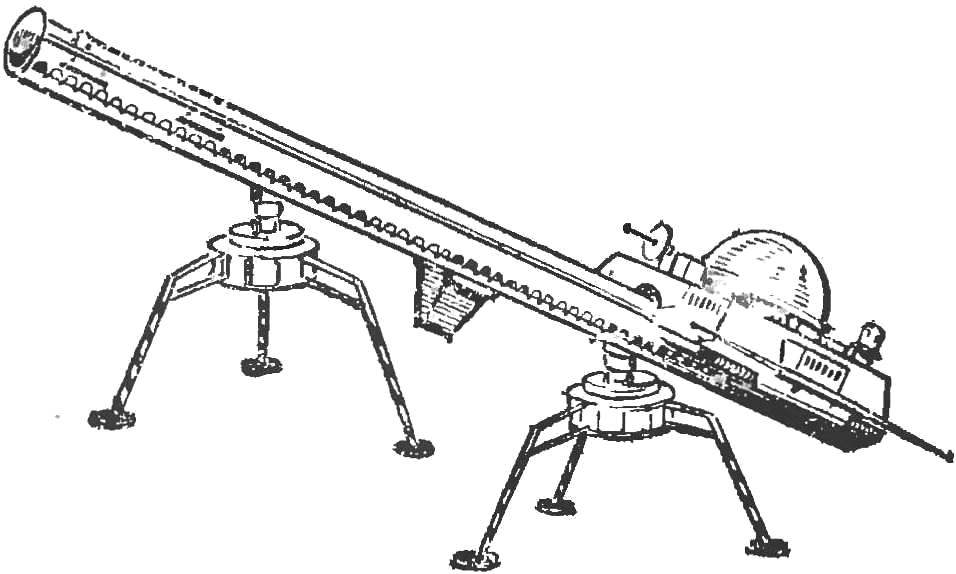
Fig. 5. Walking machine with two hard supporting tripods built young technicians (exhibition NTTM-76).
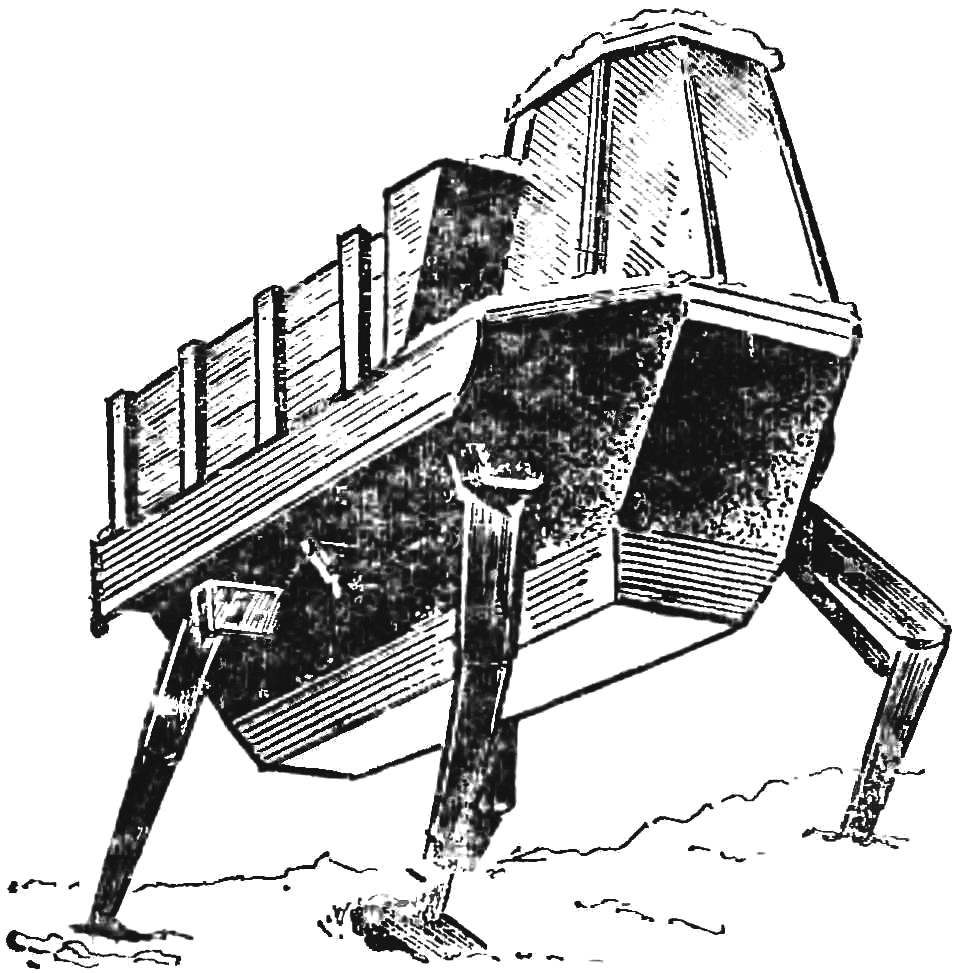
Fig. 6. Walking truck.
In our time, development get combined wheel-walking all-terrain vehicles, while using only individual elements of walking. Take, for example, the model of the American Rover “paddy wagon”. He is each of the four wheels have three колесика1 small diameter, low-pressure tires, a star located at the ends of short levers under an angle of 120° relative to each other and mounted on a common axis. All the twelve wheels of the car leading. When driving it on the highway, the position of these wheels is fixed so that the vehicle runs only on eight wheels located at the bottom of each sprocket. The transition to rougher terrain, all the stars are spinning freely, and the result is when meeting cars with obstacles located at the ends of the sprocket wheel as if to step over obstacles.
On some modern cars-vehicles began to use suspension of all wheels on the longitudinal equalizer levers with hydraulic drive (Fig. 3), which provides a rather wide freedom of movement of the wheel axle, adaptability to the terrain, like the leg of a living creature. Such beam-walking design became the Rover “Walking devil” American firms “Wagner” (Fig. 4). He has each wheel mounted on the end of a long balance bar, rotating around the point of fastening to the chassis a full 360°. All-wheel drive provides I a chain drive located inside hollow bodies of balance weights. For moving through any obstacles he alternately carries it on his front legs, tightens the body, and then rear “legs”. With a corresponding arrangement of the balance weights the Rover can move sideways on a slope, keeping the horizontal position. Depending on the location of the balance weights ground clearance reaches 1 m and for loading and unloading the machine down on the “belly”. The advantages of the Rover are complemented by its ability to swim, which it is equipped with a screw propeller.
Head of laboratory at Institute of control Sciences of the USSR, Professor G. P., Cates proposed a model of two-link wheeled walking mechanism (Fig. 2), the principle of which is also to step over an obstacle using one link and shifted his center of gravity mechanism; then pulled and the second link.
The idea of alternate perenosenna “could” in relation to the main housing like the above-described structures inherent in different model Walker Professor G. P. Katys. The supports here are two hard tripod that can move thanks to the long block frame mechanism. While one tripod is lifted And moved a certain distance forward, the car is resting on the other, and then moved to the first and carries over the second obstacle. The design is extremely simple, as the scheme itself is walking, so it has good prospects in practical use. At the exhibition NTTM-76 were shown a working model of this device constructed by young technicians (Fig. 5).
Nevertheless, no mechanism, which is partially used items walking, can not be compared with walkers, repeats all the mechanics of movement of living beings and endowed with electronic analytical control system of the machine, somewhat like the brain. These walking mechanisms, really looks like the living creatures become the most interesting area of research scientists m designers. They make a special direction in creating walking machines, working on the so-called peepulation principle. However, existing experimental models of such vehicles is not yet able to adapt to the terrain and choose the road.
Two prototypes of pedopoetry walkers built the American firm “General electric”. Here is how describes how to work one of the machines (see box) to a height of 3.5 m and a weight of 1200 kg. “Is a clumsy creation of human hands, swaying on the aluminum legs, walking is not worse than its Creator, at a speed of 8 km/h on One foot it can lift up to 500 kg of cargo and is easy to step over piles of stacked wooden vosmidesyatitonnye bars, as using a match. This “monster” capable of performing more delicate operations: putting the heavy “paw” on a chicken egg, it doesn’t even hurt his shell… the Machine can stand on two legs, on her knees, lie down on the belly, it costs nothing to pull the car out of the ditch, to make a piano through a window on the second floor, or pick up an Apple…”
And here’s another pedopoetry Walker — walking truck (Fig. 6) capacity of 250 kg, operating on the same principle as the above-described mechanism. It is equipped with a loading platform and an enclosed cockpit, capable of speeds up to 10 km/h, climbing to 45°; to facilitate loading and unloading the truck falling kneels or lies on the bottom.
And yet, despite the advantages of such walkers, their management requires special training and is not an easy task for the driver. Here the mechanism is a repetition of the movement of the person, in other words, the driver bears directly all the hardships the hard way. No wonder when using pedopoetry walkers on a level road to be equipped with automatic movement system without driver intervention.
And it was here that the scientists and engineers in many areas of science and technology, electronics, Cybernetics, mechanics, bionics and many others — is a Herculean task to create automatic “intelligent” walking machines, able to completely replace the human and to penetrate into the most secret corners of our land. Walking mechanisms — a vast field of activity for Amateur designers. Maybe it is for walking, all-terrain vehicles in the future development of the unexplored lands of our planet.
E. KOCHNEV. engineer
Recommend to read
 SLIT WITH ONE BLOW
SLIT WITH ONE BLOW
It would be good to have a set of different blades to the hose for irrigation, including end nozzle in the form of a slot: it has its advantages. And most importantly — this is easy to... THE WIND SAIL AND… WHEEL
THE WIND SAIL AND… WHEEL
Historians say that the sail appeared on land about four thousand years ago! Fiction? No - there is documentary evidence. In 1953 the Italian archaeological expedition at the excavations...
