 THE DEVELOPMENT OF COMMON TECHNICAL REQUIREMENTS
THE DEVELOPMENT OF COMMON TECHNICAL REQUIREMENTS The need for the development of a lot of technical devices are always dictated by any particular need, and ultimately aimed at improving the productivity and quality of work in production and efficiency of scientific researches or educational process.
Familiarity with the basics of General construction methods will allow the young designer faster to engage in the activity of the organization VOIR and the NTO in school, in vocational education, in the workplace. For this we consider the main stages of the design example the development of a model of one of the technical devices. Take a device that performs work on the transport of certain goods.
It looks like the technical problem in the most General form. To Refine you must go to quantitative indicators, determining the main function of this device.
Since the device has to do work, and work, as you know, is determined by the product of the force F on the distance L, i.e. A = FL. It is necessary to clarify the weight of Grp., the shape and size of the load, the distance L by which it must move, character move (up, down, horizontally, etc.), an environment in which there will be displacement, velocity, and frequency of operation of the device.
Since our goal is to develop a model of this device, it is desirable that its weight without load was not more than 1 kg and at the same time does not exceed the weight of the load, that is Sustr. ≤ Grp.
Now we will specify the conditions under which should operate a technical device. Consider three variants of the model:
1. The current model for work in school workshops.
2. The current model for work on the school experimental plot.
3. The current model simulating the operation of a planetary Rover, for example, to the surface of Mars.
The dimensions of the device in each case, the limited possibilities of manoeuvring in the working environment on a plot of dimensions of a cargo compartment of a space ship.
The study should start with analyzing the existing devices used in similar situations. For example, in the production for the movement of goods in the shop using cargo scooters, electric cars, bridge cranes, monorail hoist, belt conveyors and many more. In agricultural production are widely used conveyors, monorail, hand trolley various designs, stretcher and so on
Most of these devices unsuitable for use in school workshops and on the school grounds, they are cumbersome and too expensive for schools, require skilled care. Detailed performance analysis of such devices if you want you can spend independently.
Here we will try to develop a working model for our purposes, subject to the conditions of its application.
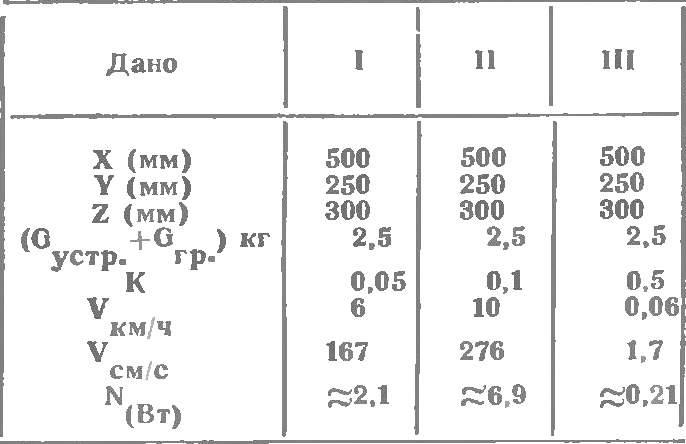
First, let’s define the approximate size of future models. Choose the dimensions: the length X = 500 mm width = 250 mm and a height (along with weight) Z= 300 mm. Now determine the approximate speed of movement of the device with a load.
In the first case, the speed limit determined by the room dimensions, the number of people working in it, the intensity and routes of movement. For school workshop will take the movement speed V1 < 6 km/h (walking pace) for a school site V2 ≤ 10 km/h.
When determining the speeds on the surface of Mars should be taken into account that the distance from Earth to this planet ranges from 78 to 378 million km, the speed of propagation C = 0.3 m·km/s. Consequently, the signal transit times from Earth to Mars t1 =78/0,3= 260 C and t2 = 378/0,3 = 1260, that is, it ranges from 4 min 20 s and 21 min If the “eyes” of our device will see the hurdle at 50 m and will give information about it on the Ground the driver-operator and he will respond instantly, the time in which to change the direction of movement, will be from 8 min 40 s to 42 min, depending on the relative positions of Earth and Mars. So, it is advisable the speed of the device on Mars to take V3 1 m/min.
Power to ensure that these defined speeds determined by the formula:
N = Fconp. X V, but Fсonp. = (Gустр. + Grp.) X K,
where K — coefficient of resistance is specified empirically. For example, for wheeled vehicles running on platforms with a smooth surface,
K = 0,05, on a country road K = 0,1, offroad K = 0,5. Transforming the formula, we get:
N = (Gycтp + Grp.) KV/10000 (W). Substitute the numerical values and the results obtained apply to the table.
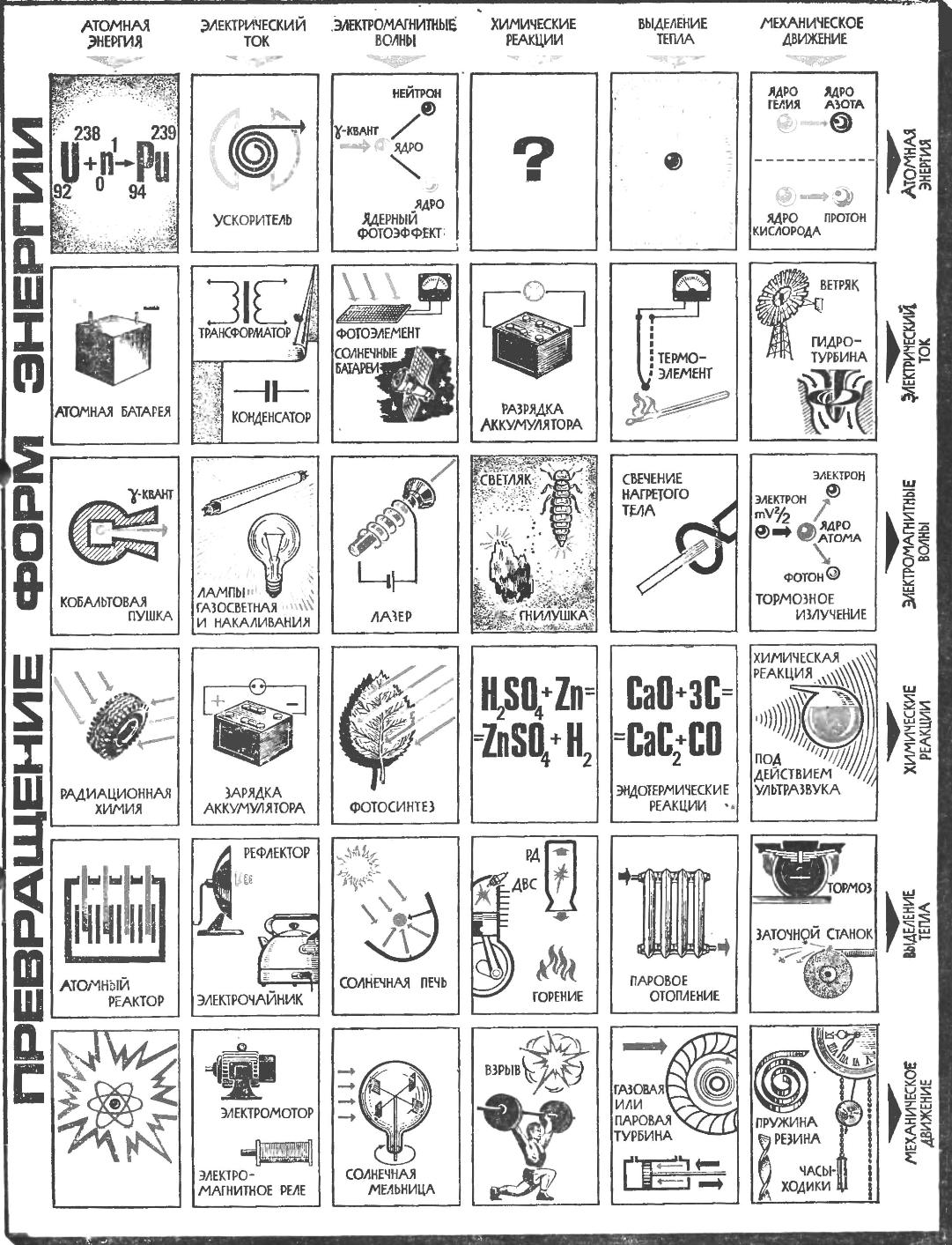
We offer you to choose the source of energy. To do this, first find out the possible options for the use of the known energy sources. For their practical use it is often necessary to pre-convert one form of energy into another. For example, for producing mechanical motion is required in the beginning to obtain electric energy, and for this purpose you can use the energy of water, sun, wind, chemical reaction, etc. it is Desirable that the path of transformation of energy into a usable form was shorter and cheaper. It is often necessary to make trade-off decisions.
The table shows some of the transformation forms of energy. The top of the table to the right is named different forms of energy, the search direction indicated by the arrow. The required option can be obtained in the square at the intersection of the lines. For example, to convert energy of electric current into mechanical motion requires motor. Recall that Mars the possibility of using solar energy are limited, they are about 2 times less than on Earth. The density of the atmosphere of Mars is much smaller than the earth, the speed of the wind is 100 m/s. to Evaluate the possibility of using different forms of energy, drives and converters, it can be with the above table.
In the end, we come to the conclusion that in all three cases, it is convenient to use the energy in form electric current that is converted to translational movement of the device and its mechanisms. In this case, the formulation of our problem leads to the conclusion that you need to develop a technical device to move cargo with electric. Further work is related to the choice of a specific engine in the appropriate directories (2, 3, 4). Suitable motors prescribed in the table.
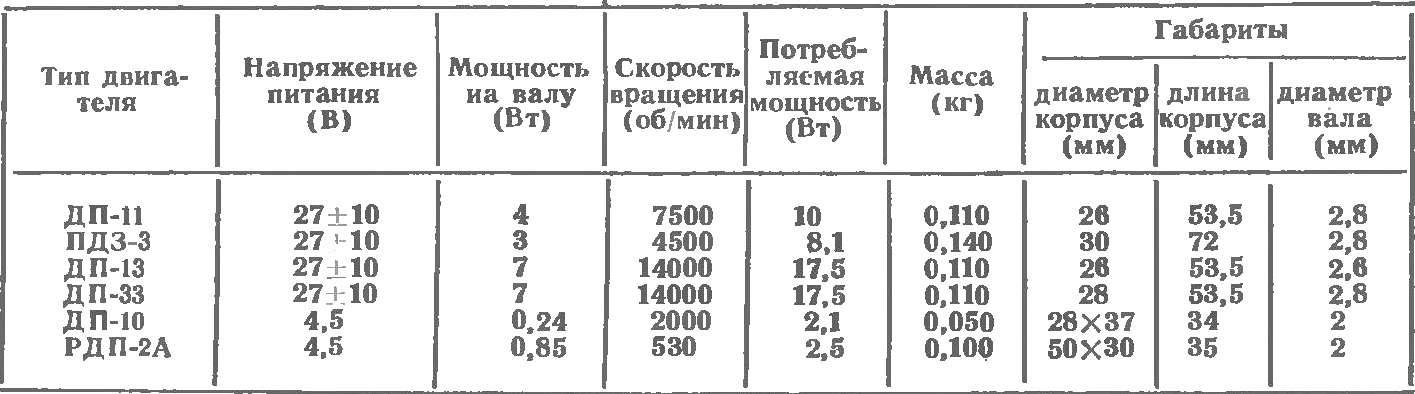
If the choice of engines is limited, then all the calculations are made in relation to the existing engine.
In this case, based on the required power, the most viable engines are to the I variant — DP-11, II — DP-13 and III — DP-10. For models of the lunar Rover can be used and the engine RDP-2A, although the power consumption, weight and size it is somewhat larger than that of DP-10, but these qualities kompensiruet the presence of a reducer, and increased shaft power.
The power of the engine is selected depending on the specific conditions of his work. For example, in the workshops of the power source are not necessarily on the device itself, the power of the engine can be carried out on the wire.
On the school grounds is possible to use the combined power of the electric motor. For example, battery charging etc. During the development of the power source for the model analysis of options, in principle, undergoes the same way. In the table write out the possible variants of power supply: transformer (if offline), batteries, battery.
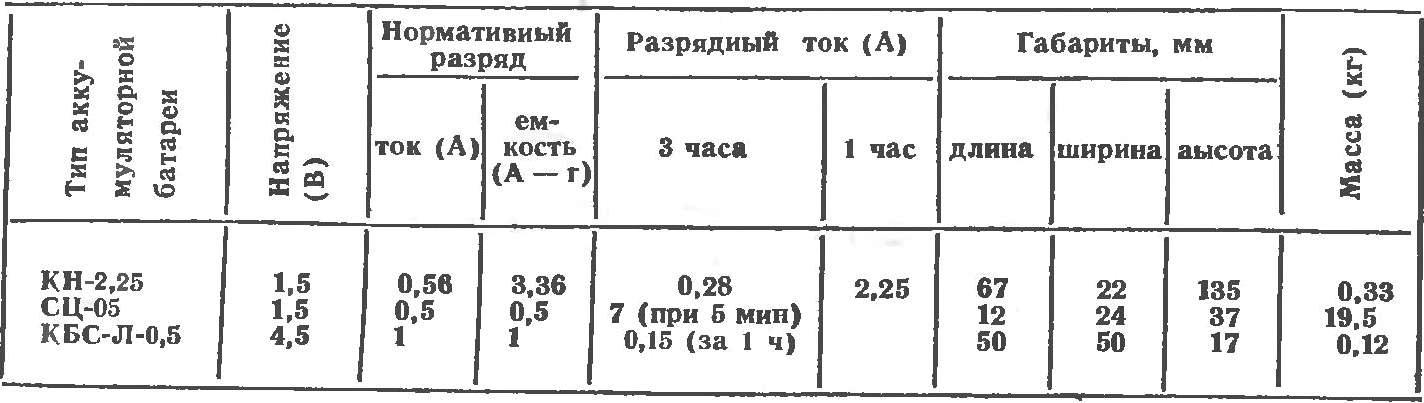
The most appropriate option in this case is the use of ASC-L is 0.5. So, we got the following results:
1. Determined the main principle of our device is electric.
2. Identified type of the electric drive device I — DP-11, II — DP-13, III — RDP-2A.
3. Outlined the possible use of batteries KBS-L is 0.5.
4. Made the table “Technical parameters of the device.”
Propose to solve the problem to determine the source of energy and transform it into mechanical motion to transport trucks that can be used:
a) in the mechanical workshop of the technical school, vocational school, high school, industrial production;
b) on the economic yard, on the farm and other objects of agricultural production;
C) on the surface of the planet Venus, where solar energy is difficult due to heavy cloud cover, the mass of the planet is 0.31 the mass of Earth, length of day is equal to 118 earth days atmospheric pressure is 15 times higher than the earth, the ambient temperature is on average 280° C and in the composition of the atmosphere is 90% CO2, 7% N, 1.5% OF H2O + O2.
Literature:
“Children’s encyclopedia”, 2nd., volume 5. M., Prosveschenie, 65.
“Look to the future.” M., “Young guard”, 1974.
Zuev P. V., Kamyshev N. I.., Model engines. M., Prosveschenie”, 1973.
“A guide for the inventor innovator”. M., Mashgiz, 1963.
Ujomov A. I., the Logical framework of the modeling method. M., Mysl’, 1971.
Physics textbooks for high school.
Recommend to read
 CAT AND MOUSE IN THE MAZE
CAT AND MOUSE IN THE MAZE
Those who have read the jump by Charles Perrault or watched the cartoon "puss in boots", remember how much trouble was the cat that didn't want to catch mice... So it opened a white... LIFT DRUM
LIFT DRUM
In the GDR skiing designed the lift with a drum on which is wound a pull cable. To do the same, you will need a moped engine with a working volume of 50 cm3, its exhaust transmission...
